Staatliches Komitee der Russischen Föderation für Hochschulbildung. Geräte zur Übermittlung der Richtung von Zielen und Signalen
In den Händen des fortgeschrittenen Beobachters der italienischen Armee ist das Aufklärungs- und Zielbestimmungsgerät Elbit PLDRII, das bei vielen Kunden im Einsatz ist, einschließlich des Marine Corps, wo es die Bezeichnung AN / PEQ-17 trägt
Auf der Suche nach einem Zweck
Um Zielkoordinaten zu generieren, muss das Datenerfassungssystem zunächst seine eigene Position kennen. Daraus kann sie die Entfernung zum Ziel und dessen Winkel zum wahren Pol bestimmen. Ein Überwachungssystem (vorzugsweise Tag und Nacht), ein genaues Ortungssystem, ein Laser-Entfernungsmesser, ein digitaler Magnetkompass sind typische Komponenten eines solchen Geräts. Es ist auch eine gute Idee in einem solchen System, ein Verfolgungsgerät zu haben, das in der Lage ist, einen codierten Laserstrahl zu identifizieren, um dem Piloten das Ziel zu bestätigen, was als Ergebnis die Sicherheit erhöht und den Kommunikationsaustausch reduziert. Zeiger hingegen sind nicht stark genug, um auf Waffen zu zielen, ermöglichen es Ihnen jedoch, das Ziel für boden- oder luftgestützte (luftgestützte) Bezeichner zu markieren, die letztendlich halbaktiv zeigen Laserkopf Zielsuchmunition zum Ziel. Schließlich können Sie mit Artillerie-Positionsradaren die Position feindlicher Artillerie genau bestimmen, selbst wenn (was meistens vorkommt) sie sich nicht in Sichtweite befinden. Wie gesagt, werden in diesem Review nur manuelle Systeme betrachtet.
Um zu verstehen, was das Militär in der Hand haben will, schauen wir uns die Anforderungen an, die die US-Armee 2014 für ihr Laseraufklärungs- und Zielbestimmungsgerät LTLM (Laser Target Location Module) II veröffentlicht hat, das schließlich das bewaffnete ersetzen soll die vorherige Version des LTLM. Die Bundeswehr rechnet mit einem Gerät von 1,8 kg (letztendlich 1,6 kg), obwohl das Gesamtsystem inklusive Gerät selbst, Kabel, Stativ und Linsenreinigungsset die Messlatte auf 4,8 kg höchstens auf 3,85 kg anheben kann. Zum Vergleich: Das aktuelle LTLM-Modul hat ein Grundgewicht von 2,5 kg und ein Gesamtgewicht von 5,4 kg. Die Zielortsfehlerschwelle ist definiert als 45 Meter bei 5 Kilometern (wie LTLM), ein praktischer wahrscheinlicher kreisförmiger Fehler (CEP) von 10 Metern bei 10 Kilometern. Für den Tagesbetrieb verfügt das LTLM II über eine Mindestvergrößerung von x7-Optik, ein Mindestsichtfeld von 6°x3,5°, eine Okularskala in 10-Mil-Schritten und eine Tagesfarbkamera. Es bietet Video-Streaming und ein breites Sichtfeld von 6°x4,5°, was bei klarem Wetter eine Erkennungsrate von 70 % auf 3,1 km und eine Identifizierung auf 1,9 km garantiert. Das enge Sichtfeld sollte nicht mehr als 3° x 2,25° betragen, vorzugsweise 2,5° x 1,87°, mit angemessenen Erkennungsbereichen von 4,2 oder 5 km und Erkennungsbereichen von 2,6 oder 3,2 km. Der Wärmebildkanal hat die gleichen Zielsichtfelder mit einer Erkennungswahrscheinlichkeit von 70 % bei 0,9 und 2 km und einer Identifizierung bei 0,45 und 1 km. Zieldaten werden in der UTM/UPS-Koordinateneinheit gespeichert, und Daten und Bilder werden über RS-232- oder USB 2.0-Anschlüsse übertragen. Die Stromversorgung erfolgt über L91 AA-Lithiumbatterien. Die Mindestfähigkeit zum Herstellen einer Kommunikation sollte durch einen leichten, hochpräzisen GPS-Empfänger PLGR (Precision Lightweight GPS Receiver) und einen fortschrittlichen militärischen GPS-Empfänger DAGR (Defense Advanced GPS Receiver) sowie durch entwickelte GPS-Systeme bereitgestellt werden. Die Armee würde jedoch ein System bevorzugen, das auch mit dem Forward Entry Device im Taschenformat, Forward Observer Software/System, Force XXI Battle Command, Brigade-and-Below und dem Network Soldier System Net Warrior koppeln könnte.
BAE Systems bietet zwei Aufklärungs- und Zielbestimmungsgeräte an. Das UTB X-LRF ist eine Weiterentwicklung des UTB X-Geräts, dem ein Laser-Entfernungsmesser der Klasse 1 mit einer Reichweite von 5,2 km hinzugefügt wurde. Das Gerät basiert auf einer ungekühlten Wärmebildmatrix von 640 x 480 Pixeln mit einem Abstand von 17 Mikrometern, es kann Optiken mit einer Brennweite von 40, 75 und 120 mm mit der entsprechenden Vergrößerung x2,1, x3,7 und x6,6 haben , diagonale Sichtfelder 19°, 10,5° und 6,5° und 2-facher elektronischer Zoom. Laut BAE Systems betragen die Bereiche der positiven (80% Wahrscheinlichkeit) Erkennung eines NATO-Standardziels mit einer Fläche von 0,75 m2 1010, 2220 bzw. 2660 Meter. Das UTB X-LRF ist mit einem GPS-System mit einer Genauigkeit von 2,5 Metern und einem digitalen Magnetkompass ausgestattet. Es enthält auch einen Laserpointer der Klasse 3B im sichtbaren und infraroten Spektrum. Das Gerät kann bis zu hundert Bilder im unkomprimierten BMP-Format speichern. Die Stromversorgung erfolgt über vier L91-Lithiumbatterien, die fünf Stunden Betriebszeit bieten, obwohl das Instrument über den USB-Anschluss an eine externe Stromquelle angeschlossen werden kann. Das UTB X-LRF ist 206 mm lang, 140 mm breit und 74 mm hoch und wiegt ohne Batterien 1,38 kg.

In der US-Armee ist Trigr von BAE Systems als Laser Target Locator Module bekannt, es enthält ein ungekühltes Wärmebild-Array und wiegt weniger als 2,5 kg.

Das UTB X-LRF-Gerät ist eine Weiterentwicklung des UTB X, es wurde ein Laser-Entfernungsmesser hinzugefügt, der es ermöglichte, das Gerät in ein vollwertiges Aufklärungs-, Überwachungs- und Zielbestimmungssystem zu verwandeln
Ein weiteres Produkt von BAE Systems ist das Laseraufklärungs- und Zielbestimmungsgerät Trigr (Target Reconnaissance Infrared GeoLocating Rangefinder), das in Zusammenarbeit mit Vectronix entwickelt wurde. BAE Systems stattet das Instrument mit einer ungekühlten Wärmebildkamera und einem hochmodernen GPS-Empfänger mit selektiver Verfügbarkeit aus, während Vectronix eine 7-fache Vergrößerungsoptik, einen 5-km-Faserlaser-Entfernungsmesser und einen digitalen Magnetkompass bereitstellt. Nach Angaben des Unternehmens garantiert das Trigr-Gerät einen CEP von 45 Metern in einer Entfernung von 5 km. Die Erkennungsreichweite beträgt tagsüber 4,2 km oder nachts mehr als 900 Meter. Das Gerät wiegt weniger als 2,5 kg, zwei Sets garantieren den Betrieb rund um die Uhr. Das Gesamtsystem mit Stativ, Batterien und Kabeln wiegt 5,5 kg. In der US Army erhielt das Gerät die Bezeichnung Laser Target Locator Module; 2009 erhielt sie einen unbestimmten Fünfjahresvertrag sowie zwei weitere im August 2012 und Januar 2013 im Wert von 23,5 Millionen US-Dollar bzw. 7 Millionen US-Dollar.
Das tragbare Laseraufklärungs-, Überwachungs- und Zielbestimmungsgerät Northrop Grumman Mark VII wurde durch ein verbessertes Mark VIIE-Gerät ersetzt. Dieses Modell erhielt einen Wärmebildkanal anstelle des Bides Vorgängermodells. Der ungekühlte Sensor verbessert die Sichtbarkeit bei Nacht und unter schwierigen Bedingungen erheblich; Es verfügt über ein Sichtfeld von 11,1°x8,3°. Der Tageskanal basiert auf einer vorausschauenden Optik mit einer 8,2-fachen Vergrößerung und einem Sichtfeld von 7°x5°. Der digitale Magnetkompass ist ±8 mil genau, der elektronische Neigungsmesser ist ±4 mil genau und die Position wird von einem eingebauten selektiven GPS/SAASM-Anti-Jamming-Modul bereitgestellt. Laser-Entfernungsmesser Nd-Yag (Laser auf Yttrium-Aluminium-Granat mit Neodym) mit optischer Parametererzeugung bietet maximale Reichweite 20 km mit einer Genauigkeit von ±3 Metern. Der Mark VIIE wiegt mit neun handelsüblichen CR123-Zellen 2,5 kg und ist mit einer RS-232/422-Datenschnittstelle ausgestattet.
Das neueste Produkt im Portfolio von Northrop Grumman ist das HHPTD (Hand Held Precision Targeting Device), das weniger als 2,26 kg wiegt. Im Vergleich zu seinen Vorgängern verfügt es über einen Tageslicht-Farbkanal sowie ein nicht-magnetisches Himmelsnavigationsmodul, das die Genauigkeit deutlich auf das Niveau verbessert, das von moderner GPS-geführter Munition gefordert wird. Ein Auftrag über 9,2 Millionen US-Dollar zur Entwicklung des Geräts wurde im Januar 2013 in Zusammenarbeit mit Flir, General Dynamics und Wilcox vergeben. Im Oktober 2014 wurde das Gerät auf der Raketenreichweite von White Sands getestet.

Das handgehaltene Präzisionszielgerät ist eine der neuesten Entwicklungen von Northrop Grumman; Die umfangreichen Tests wurden Ende 2014 durchgeführt

Der Hauptkanal der Flir Recon B2-Familie ist ein gekühlter Wärmebildkanal. Gerät B2-FO mit einem zusätzlichen Tageskanal in den Händen eines italienischen Kommandos (im Bild)
Flir hat mehrere tragbare Zielgeräte in seinem Portfolio und arbeitet mit anderen Unternehmen zusammen, um Nachtsichtgeräte für solche Systeme bereitzustellen. Das Recon B2 verfügt über einen Hauptwärmebildkanal, der im mittleren IR-Bereich arbeitet. Der 640 x 480 gekühlte Indium-Antimonid-Sensor bietet ein 10° x 8° breites Sichtfeld, ein 2,5° x 1,8° schmales Sichtfeld und einen 4-fachen kontinuierlichen elektronischen Zoom. Der Wärmebildkanal ist mit Autofokus, automatischer Helligkeitsregelung und digitaler Datenverbesserung ausgestattet. Der Zusatzkanal kann entweder mit einem Tagessensor (Modell B2-FO) oder einem Ferninfrarotkanal (Modell B2-DC) ausgestattet werden. Die erste basiert auf einer 1/4-Zoll-Farb-CCD-Farbkamera mit einer 794x494-Matrix mit x4-kontinuierlichem Digitalzoom und zwei gleichen Sichtfeldern wie das Vorgängermodell. Der zusätzliche Wärmebildkanal basiert auf einem 640x480-Vanadiumoxid-Mikrobolometer und bietet einen 18-fache Vergrößerung x4. Das B2 verfügt über ein GPS-C/A-Code-Modul (Coarse Acquisition Code) (es kann jedoch ein militärisches Standard-GPS-Modul eingebaut werden, um die Genauigkeit zu verbessern), einen digitalen Magnetkompass und einen Laser-Entfernungsmesser mit einer Reichweite von 20 km und einen 852-nm-Laserpointer der Klasse 3B.Das B2 kann bis zu 1000 JPEG-Bilder speichern, die über USB oder RS-232/422 hochgeladen werden können, NTSC/PAL und HDMI sind ebenfalls für Videoaufzeichnungen verfügbar.Das Instrument wiegt weniger als 4 kg , inklusive sechs D-Batterien für vier Stunden Dauerbetrieb oder mehr als fünf Stunden im Energiesparmodus Modus. Der Recon B2 kann mit einem Fernbedienungskit ausgestattet werden, das ein Stativ, einen Schwenk-/Neigekopf, eine Strom- und Kommunikationsbox sowie eine Steuerbox umfasst.

Flir bietet eine leichtere Version des Überwachungs- und Zielgeräts Recon V an, das einen Wärmesensor, einen Entfernungsmesser und andere typische Sensoren in einem 1,8-kg-Koffer enthält.
Das leichtere Modell Recon B9-FO verfügt über einen ungekühlten Wärmebildkanal mit einem Sichtfeld von 9,3°x7° und einem 4-fachen Digitalzoom. Die Farbkamera verfügt über einen 10-fachen kontinuierlichen Zoom und einen 4-fachen Digitalzoom, während der GPS-Empfänger, der digitale Kompass und die Laserpointer-Funktionen mit denen des B2 identisch sind. Der Hauptunterschied liegt im Entfernungsmesser, der eine maximale Reichweite von 3 km hat. Der B9-FO ist für den Betrieb mit kürzerer Reichweite ausgelegt; Es wiegt auch deutlich weniger als das B2, weniger als 2,5 kg mit zwei D-Batterien, die fünf Stunden Dauerbetrieb ermöglichen.
Ohne Tageskanal wiegt der Recon V mit nur 1,8 kg sogar noch weniger, mit Batterien, die sechs Stunden Hot-Swap-Betrieb ermöglichen. Seine 640 x 480 Indium-Antimonid-gekühlte Matrix arbeitet im mittleren IR-Bereich des Spektrums, es hat eine Optik mit 10-facher Vergrößerung (weites Sichtfeld 20° x 15°). Das Entfernungsmessgerät ist auf eine Reichweite von 10 km ausgelegt, während das auf mikroelektromechanischen Systemen basierende Gyroskop für die Bildstabilisierung sorgt.
Das französische Unternehmen Sagem bietet drei binokulare Lösungen für die Tag/Nacht-Zielerfassung an. Sie verfügen alle über denselben Tagesfarbkanal mit einem Sichtfeld von 3° x 2,25°, einen augensicheren 10-km-Laser-Entfernungsmesser, einen digitalen Magnetkompass mit 360°-Azimut und ±40°-Elevationswinkel sowie ein GPS-C/S Modul mit einer Genauigkeit von bis zu drei Metern (das Gerät kann an ein externes GPS-Modul angeschlossen werden). Der Hauptunterschied zwischen den Geräten liegt im Wärmebildkanal.
Ganz oben auf der Liste steht das multifunktionale Fernglas Jim UC, das über einen ungekühlten 640x480-Sensor mit identischen Sichtfeldern bei Tag und Nacht verfügt, während das weite Sichtfeld 8,6°x6,45° beträgt. Jim UC ist mit Digitalzoom, Bildstabilisierung, integrierter Foto- und Videoaufnahme ausgestattet; optionale Bildfusionsfunktion zwischen Tag- und Wärmebildkanälen. Es enthält auch einen augensicheren 0,8-µm-Laserpointer sowie analoge und digitale Anschlüsse. Ohne Batterien wiegt das Fernglas 2,3 kg. Der wiederaufladbare Akku bietet mehr als fünf Stunden Dauerbetrieb.

Das multifunktionale Fernglas Jim Long Range der französischen Firma Sagem wurde als Teil der Felin-Kampfausrüstung an die französische Infanterie geliefert; Auf dem Foto ist das Fernglas auf dem Sterna-Zielkennzeichnungsgerät von Vectronix montiert
Als nächstes kommt das weiterentwickelte Multifunktionsfernglas Jim LR, aus dem übrigens das UC-Gerät „knosp“ wurde. Es ist im Dienst der französischen Armee und Teil der Kampfausrüstung des französischen Soldaten Felin. Jim LR verfügt über einen Wärmebildkanal mit einem 320x240-Pixel-Sensor, der im Bereich von 3-5 µm arbeitet; Das schmale Sichtfeld ist das gleiche wie beim UC-Modell und das weite Sichtfeld beträgt 9°x6,75°. Optional ist ein leistungsstärkerer Laserpointer erhältlich, der die Reichweite von 300 auf 2500 Meter erhöht. Das Kühlsystem erhöht natürlich die Masse der Jim LR-Geräte auf 2,8 kg ohne Batterien. Das gekühlte Wärmebildmodul verbessert jedoch die Leistung erheblich, die Reichweiten der Erkennung, Erkennung und Identifizierung einer Person betragen jeweils 3/1/0,5 km für das UC-Modell und 7/2,5/1,2 km für das LR-Modell.
Abgerundet wird das Sortiment durch das Multifunktionsfernglas Jim HR mit noch höherer Leistung, das durch eine hochauflösende VGA 640x480-Matrix bereitgestellt wird.
Die Sagem-Sparte von Vectronix bietet zwei Überwachungsplattformen an, die in Verbindung mit Systemen von Vectronix und/oder Sagem äußerst genaue, modulare Zielwerkzeuge bilden.
Der im Lieferumfang der GonioLight Digital Observation Station enthaltene digitale Magnetkompass ist auf 5 mils (0,28°) genau. Der Anschluss eines echten (geographischen) Polgyroskops verbessert die Genauigkeit auf 1 mil (0,06°). Zwischen der eigentlichen Station und dem Stativ ist ein 4,4 kg schweres Gyroskop eingebaut, wodurch sich das Gesamtgewicht von GonioLight, Gyroskop und Stativ auf 7 kg beläuft. Ohne ein Gyroskop kann eine solche Genauigkeit durch die Verwendung integrierter topografischer Referenzierungsverfahren unter Verwendung bekannter Orientierungspunkte oder Himmelskörper erreicht werden. Das System hat ein eingebautes GPS-Modul und einen Zugangskanal zu einem externen GPS-Modul. Die GonioLight-Station ist mit einem beleuchteten Bildschirm ausgestattet und verfügt über Schnittstellen für Computer, Kommunikationsgeräte und andere externe Geräte. Im Störungsfall verfügt das System über Hilfsskalen zur Richtungs- und Höhenwinkelbestimmung. Das System ermöglicht es Ihnen, eine Vielzahl von Tag- und Nachtüberwachungsgeräten und Entfernungsmessern zu akzeptieren, wie z. B. die Entfernungsmesser der Vector-Familie oder das oben beschriebene Sagem Jim-Fernglas. Spezielle Halterungen im oberen Teil der GonioLight-Station erlauben zudem den Einbau von zwei optoelektronischen Subsystemen. Das Gesamtgewicht variiert von 9,8 kg in der GLV-Konfiguration, die GonioLight plus Vector-Entfernungsmesser umfasst, bis zu 18,1 kg in der GL G-TI-Konfiguration, die GonioLight, Vector, Jim-LR und Gyroskop umfasst. Die Beobachtungsstation GonioLight wurde Anfang der 2000er Jahre entwickelt und seitdem wurden mehr als 2000 dieser Systeme in viele Länder geliefert. Diese Station wurde auch bei Kampfhandlungen im Irak und in Afghanistan eingesetzt.
Die Erfahrung von Vectronix half ihnen bei der Entwicklung des ultraleichten, nichtmagnetischen Sterna-Zielbestimmungssystems. Wenn GonioLite für Reichweiten über 10 km ausgelegt ist, dann Sterna für Reichweiten von 4-6 km. Zusammen mit dem Stativ wiegt das System etwa 2,5 kg und ist unter Verwendung bekannter Orientierungspunkte in jedem Breitengrad auf weniger als 1 mil (0,06°) genau. Auf diese Weise erhalten Sie einen Zielortungsfehler von weniger als vier Metern in einer Entfernung von 1,5 km. Für den Fall, dass Orientierungspunkte nicht verfügbar sind, ist das Sterna-System mit einem halbkugelförmigen Resonanzkreisel ausgestattet, der gemeinsam von Sagem und Vectronix entwickelt wurde und eine Genauigkeit von 2 Mil (0,11°) bei der Bestimmung des wahren Nordens bis zu einem Breitengrad von 60° bietet. Die Einrichtungs- und Orientierungszeit beträgt weniger als 150 Sekunden, und eine grobe Ausrichtung von ±5° ist erforderlich. Das Sterna wird von vier CR123A-Zellen mit Strom versorgt, die 50 Ausrichtungen und 500 Messungen ermöglichen. Wie GonlioLight kann das Sterna-System verschiedene Arten von optoelektronischen Systemen aufnehmen. Das Portfolio von Vectronix umfasst beispielsweise das leichteste Instrument mit weniger als 3 kg, das PLRF25C, und das etwas schwerere (weniger als 4 kg) Moskito. Für komplexere Aufgaben können Vector- oder Jim-Geräte hinzugefügt werden, aber das Gewicht erhöht sich auf 6 kg. Das Sterna-System verfügt über einen speziellen Befestigungspunkt für die Zapfenmontage Fahrzeug, von dem es für demontierte Operationen schnell entfernt werden kann. Zur Auswertung wurden diese Systeme in großen Mengen an die Truppe geliefert. Die US-Armee bestellte Vectronix-Handheld-Systeme und Sterna-Systeme als Teil der im Juli 2012 herausgegebenen Anforderungen für Handheld High Precision Targeting Device. Vectronix ist zuversichtlich für das weitere Umsatzwachstum des Sterna-Systems im Jahr 2015.
Im Juni 2014 zeigte Vectronix das Überwachungs- und Zielbestimmungsgerät Moskito TI mit drei Kanälen: Tagoptik mit 6-facher Vergrößerung, Optik (CMOS-Technologie) mit Helligkeitsverstärkung (beide mit 6,25°-Sichtfeld) und ungekühlte Wärmebildkamera mit 12° Sichtfeld. Das Gerät enthält außerdem einen 10-km-Entfernungsmesser mit einer Genauigkeit von ±2 Metern und einen digitalen Kompass mit einer Genauigkeit von ±10 Mil (±0,6°) im Azimut und ±3 Mil (±0,2°) in der Höhe. Das GPS-Modul ist optional, es gibt jedoch einen Anschluss für externe zivile und militärische GPS-Empfänger sowie Galileo- oder GLONASS-Module. Es ist möglich, einen Laserpointer anzuschließen. Das Moskito TI-Gerät verfügt über RS-232-, USB 2.0- und Ethernet-Schnittstellen, die drahtlose Bluetooth-Kommunikation ist optional. Es wird mit drei Batterien oder CR123A-Batterien betrieben und bietet über sechs Stunden ununterbrochenen Betrieb. Und schließlich sind alle oben genannten Systeme in einem 130 x 170 x 80 mm großen Gerät verpackt, das weniger als 1,3 kg wiegt. Dieses neue Produkt ist eine Weiterentwicklung des Moskito-Modells, das mit einer Masse von 1,2 kg über einen Tageskanal und einen Kanal mit Helligkeitsverstärkung, einen Laser-Entfernungsmesser mit einer Reichweite von 10 km, einen digitalen Kompass verfügt; Optional ist die Einbindung ziviler Standard-GPS oder der Anschluss an einen externen GPS-Empfänger möglich.
Thales bietet ein komplettes Sortiment an Aufklärungs-, Überwachungs- und Zielbestimmungssystemen. Das 3,4 kg schwere Sophie UF-System verfügt über einen optischen Tageskanal mit 6-facher Vergrößerung und einem Sichtfeld von 7°. Die Reichweite des Laser-Entfernungsmessers beträgt bis zu 20 km, der Sophie UF kann mit einem GPS-Empfänger mit P(Y)-Code (verschlüsselter Code für die genaue Ortung eines Objekts) oder C/A-Code (grober Ortungscode für Objekte) ausgestattet werden , die an einen externen DAGR / PLGR-Empfänger angeschlossen werden kann. Ein magnetoresistiver Digitalkompass mit 0,5° Azimutgenauigkeit und ein Schwerkraftsensor-Neigungsmesser mit 0,1° Genauigkeit runden das Sensorpaket ab. Das Gerät wird mit AA-Zellen betrieben und bietet eine Betriebsdauer von 8 Stunden. Das System kann in den Modi zum Korrigieren des Granatenfalls und zum Melden von Daten über das Ziel arbeiten; zum Exportieren von Daten und Bildern ist es mit RS232/422-Anschlüssen ausgestattet. Das Sophie UF-System ist auch bei der britischen Armee unter der Bezeichnung SSARF (Surveillance System and Range Finder) im Einsatz.
Lassen Sie uns von einfach zu komplex übergehen und uns auf das Sophie MF-Gerät konzentrieren. Es umfasst eine gekühlte 8-12-µm-Wärmebildkamera mit einem breiten 8°x6°- und einem schmalen 3,2°x2,4°-Sichtfeld und einem x2-Digitalzoom. Optional gibt es einen Farbtageskanal mit einem Sichtfeld von 3,7°x2,8° sowie einen Laserpointer mit einer Wellenlänge von 839 nm. Das Sophie MF-System umfasst außerdem einen 10-km-Laser-Entfernungsmesser, einen eingebauten GPS-Empfänger, einen Anschluss für den Anschluss an einen externen GPS-Empfänger und einen Magnetkompass mit einer Genauigkeit von 0,5° im Azimut und 0,2° in der Höhe. Sophie MF wiegt 3,5 kg und läuft über vier Stunden mit einem Satz Batterien.
Die Sophie XF ist fast identisch mit dem MF-Modell, der Hauptunterschied liegt im Wärmebildsensor, der im mittelwelligen (3-5 µm) IR-Bereich des Spektrums arbeitet und einen weiten 15°x11,2° und hat schmales Sichtfeld von 2,5° x 1,9°, optische Vergrößerung x6 und elektronische Vergrößerung x2. Für die Videodatenausgabe stehen analoge und HDMI-Ausgänge zur Verfügung, da Sophie XF bis zu 1000 Fotos oder bis zu 2 GB Video speichern kann. Es gibt auch RS 422- und USB-Anschlüsse. Das XF-Modell hat die gleiche Größe und das gleiche Gewicht wie das MF-Modell, obwohl der Akku etwas mehr als sechs oder sieben Stunden hält.
Das auf Goniometer und Panoramaköpfe spezialisierte britische Unternehmen Instro Precision hat ein modulares Aufklärungs- und Zielbestimmungssystem MG-TAS (Modular Gyro Target Acquisition System) entwickelt, das auf einem Kreisel basiert und eine hochpräzise Bestimmung des wahren Pols ermöglicht. Die Genauigkeit beträgt weniger als 1 mil (nicht durch magnetische Interferenzen beeinträchtigt) und das digitale Goniometer bietet je nach Magnetfeld eine Genauigkeit von 9 mil. Das System umfasst auch ein leichtes Stativ und einen robusten Handheld-Computer mit einem vollständigen Satz von Zielwerkzeugen zur Berechnung von Zieldaten. Die Schnittstelle bietet Ihnen die Möglichkeit, einen oder zwei Zielkennzeichnungssensoren zu installieren.

Vectronix hat ein leichtes, nicht magnetisches Sterna-Aufklärungs- und Zielbestimmungssystem mit einer Reichweite von 4 bis 6 Kilometern entwickelt (auf dem Foto installiert auf einem Sagem Jim-LR)

Der neueste Zuwachs in der Familie der Zielgeräte ist das Modell Vectronix Moskito 77, das über zwei Tageslicht- und einen Wärmebildkanal verfügt.

Mit dem Sophie XF-Gerät von Thales können Sie die Koordinaten des Ziels bestimmen, und für die Nachtsicht gibt es einen Sensor, der im mittleren IR-Bereich des Spektrums arbeitet

Für die deutsche Gebirgsjägertruppe wurde das Airbus-DS-Nestor-System mit gekühlter Wärmebildmatrix und einer Masse von 4,5 kg entwickelt. Es ist bei mehreren Armeen im Einsatz
Airbus DS Optronics bietet zwei Nestor- und TLS-40-Aufklärungs-, Überwachungs- und Zielbestimmungsgeräte an, die beide in Südafrika hergestellt werden. Das Nestor-Gerät, dessen Produktion 2004-2005 begann, wurde ursprünglich für deutsche Gebirgsgewehreinheiten entwickelt. Das 4,5 kg schwere biokulare System umfasst einen Tageskanal mit 7-facher Vergrößerung und einem Sichtfeld von 6,5° mit einem Fadenkreuz von 5 mil sowie einen Wärmebildkanal, der auf einer gekühlten Matrix mit einer Größe von 640 x 512 Pixeln und zwei Feldern basiert Ansicht, eng 2,8°x2,3° und breit (11,4°x9,1°). Die Entfernung zum Ziel wird mit einem Laser-Entfernungsmesser der Klasse 1M mit einer Reichweite von 20 km und einer Genauigkeit von ± 5 Metern und einstellbarem Strobing (Impulsfolgefrequenz) in der Reichweite gemessen. Die Richtung und Höhe des Ziels wird von einem digitalen Magnetkompass mit einer Genauigkeit von ±1° im Azimut und ±0,5° in der Höhe bereitgestellt, während der messbare Höhenwinkel +45° beträgt. Der Nestor hat einen eingebauten 12-Kanal-GPS-L1-C/A-Empfänger (grobe Auflösung), und es können auch externe GPS-Module angeschlossen werden. Es gibt einen CCIR-PAL-Videoausgang. Das Gerät wird mit Lithium-Ionen-Akkus betrieben, kann aber auch an eine externe Gleichstromquelle mit 10-32 Volt angeschlossen werden. Die gekühlte Wärmebildkamera erhöht die Masse des Systems, erhöht aber gleichzeitig die Nachtsichtfähigkeiten. Das System ist bei mehreren europäischen Armeen im Einsatz, darunter die Bundeswehr, mehrere europäische Grenztruppen und namentlich nicht genannte Käufer aus dem Nahen und Fernen Osten. Für 2015 rechnet das Unternehmen mit mehreren Großaufträgen für Hunderte von Anlagen, neue Kunden werden dort aber nicht genannt.
Basierend auf den Erfahrungen aus dem Bau des Nestor-Systems entwickelte Airbus DS Optronics das leichtere Opus-H-System mit ungekühltem Wärmebildkanal. Die Auslieferung begann im Jahr 2007. Es hat den gleichen Tageslichtkanal, während das mikrobolmetrische Array mit 640 x 480 ein Sichtfeld von 8,1° x 6,1° und die Möglichkeit bietet, Bilder im JPG-Format zu speichern. Andere Komponenten wurden unverändert gelassen, darunter der Monopuls-Laser-Entfernungsmesser, der nicht nur den Messbereich ohne die Notwendigkeit einer Stativstabilisierung erweitert, sondern auch bis zu drei Ziele in jeder Entfernung erkennt und anzeigt. Die seriellen USB 2.0-, RS232- und RS422-Anschlüsse werden ebenfalls vom Vorgängermodell beibehalten. Acht AA-Elemente sorgen für die Stromversorgung. Der Opus-H wiegt etwa ein kg weniger als der Nestor und ist mit 300 x 215 x 110 mm auch kleiner als 360 x 250 x 155 mm. Käufer des Opus-H-Systems aus militärischen und paramilitärischen Strukturen wurden nicht bekannt gegeben.


Airbus DS Optronics Opus-H-System
Aufgrund des wachsenden Bedarfs an leichten und kostengünstigen Zielsystemen hat Airbus DS Optronics (Pty) eine Reihe von TLS 40-Geräten entwickelt, die mit Batterien weniger als 2 kg wiegen. Drei Modelle sind verfügbar: TLS 40 nur mit Tageslicht, TLS 40i mit Bildverbesserung und TLS 40IR mit ungekühltem Wärmebildsensor. Ihr Laser-Entfernungsmesser und GPS sind die gleichen wie beim Nestor. Der digitale Magnetkompass arbeitet über einen Bereich von ±45° Vertikalwinkel, ±30° Querneigungswinkel und bietet eine Azimutgenauigkeit von ±10 mil und eine Höhengenauigkeit von ±4 mil. Wie bei den beiden Vorgängermodellen hat der biokulare Tageslichtkanal mit der gleichen Strichplatte wie beim Nestor-Gerät eine 7-fache Vergrößerung und ein Sichtfeld von 7°. Die Bildverbesserungsvariante TLS 40i verfügt über einen monokularen Kanal auf Basis des Photonis XR5-Tubus mit 7-facher Vergrößerung und einem 6°-Sehfeld. Die Modelle TLS 40 und TLS 40i haben dasselbe physikalische Eigenschaften, ihre Abmessungen betragen 187x173x91 mm. Bei gleichem Gewicht wie die beiden anderen Modelle ist das TLS 40IR mit 215 x 173 x 91 mm größer. Es hat einen monokularen Tageskanal mit gleicher Vergrößerung und einem etwas engeren Gesichtsfeld von 6°. Das 640 x 312 Mikrobolometer-Array bietet ein Sichtfeld von 10,4° x 8,3° mit 2-fachem Digitalzoom. Das Bild wird auf einem schwarz-weißen OLED-Display angezeigt. Alle TLS 40-Modelle können optional mit einer 0,89°x0,75°-Tageskamera zur Aufnahme von Bildern im JPG-Format und einem Diktiergerät zur Aufzeichnung von Sprachkommentaren im WAV-Format mit 10 Sekunden pro Bild ausgestattet werden. Alle drei Modelle werden mit drei CR123-Batterien oder einem externen 6-15-Volt-Netzteil betrieben, verfügen über serielle USB 1.0-, RS232-, RS422- und RS485-Anschlüsse, PAL- und NTSC-Videoausgänge und können auch mit einem externen GPS-Empfänger ausgestattet werden. Die TLS 40-Serie wurde bereits bei namentlich nicht genannten Kunden, darunter auch in Afrika, in Dienst gestellt.

Der Nyxus Bird Gyro unterscheidet sich vom Vorgängermodell Nyxus Bird durch einen echten Polkreisel, der die Genauigkeit der Positionsbestimmung des Ziels auf große Entfernungen deutlich verbessert.
Das deutsche Unternehmen Jenoptik hat das Tag-Nacht-Aufklärungs-, Überwachungs- und Zielbestimmungssystem Nyxus Bird entwickelt, das in Mittel- und Langstreckenversionen erhältlich ist. Der Unterschied liegt im Wärmebildkanal, der in der mittleren Reichweitenvariante mit einem Objektiv mit einem Sichtfeld von 11°x8° ausgestattet ist. Die Erfassungs-, Erkennungs- und Identifizierungsreichweite eines Standard-NATO-Ziels beträgt 5, 2 bzw. 1 km. Die Long-Range-Variante mit 7°x5°-Sichtfeldoptik bietet größere Reichweiten von 7, 2,8 bzw. 1,4 km. Die Matrixgröße für beide Optionen beträgt 640 x 480 Pixel. Der Tageskanal der beiden Varianten hat ein Sichtfeld von 6,75° und eine 7-fache Vergrößerung. Der Laser-Entfernungsmesser der Klasse 1 hat eine typische Reichweite von 3,5 km, der digitale Magnetkompass liefert eine Genauigkeit von 0,5° im Azimut im 360°-Sektor und in der Höhe von 0,2° im 65°-Sektor. Der Nyxus Bird verfügt über mehrere Messmodi und kann bis zu 2000 Infrarotbilder speichern. Mit eingebautem GPS kann es jedoch mit einem PLGR/DAGR-System verbunden werden, um die Genauigkeit weiter zu verbessern. Für die Übertragung von Fotos und Videos gibt es einen USB 2.0-Anschluss, kabelloses Bluetooth ist optional. Mit einem 3 Volt Lithium-Akku wiegt das Gerät 1,6 kg, ohne Augenmuschel beträgt die Länge 180 mm, die Breite 150 mm und die Höhe 70 mm. Der Nyxus Bird ist Teil des Modernisierungsprogramms IdZ-ES der Bundeswehr. Das Hinzufügen eines taktischen Micro Pointer-Computers mit einem integrierten geografischen Informationssystem erhöht die Fähigkeit, Ziele zu lokalisieren, erheblich. Der Micro Pointer wird von internen und externen Netzteilen mit Strom versorgt, hat RS232-, RS422-, RS485- und USB-Anschlüsse und einen optionalen Ethernet-Anschluss. Dieser kleine Computer (191 x 85 x 81 mm) wiegt nur 0,8 kg. Ein weiteres optionales System ist das nichtmagnetische True-Pole-Gyroskop, das auf allen ultralangen Distanzen eine sehr genaue Ausrichtung und präzise Zielposition liefert. Ein Kreiselkopf mit denselben Anschlüssen wie der Micro Pointer kann an ein externes PLGR/DAGR-GPS-System angeschlossen werden. Vier CR123A-Elemente bieten 50 Ausrichtungen und 500 Messungen. Der Kopf wiegt 2,9 kg und das ganze System mit Stativ 4,5 kg.
Das finnische Unternehmen Millog hat ein manuelles Lisa-Zielbestimmungssystem entwickelt, das eine ungekühlte Wärmebildkamera und einen optischen Kanal mit Erkennungs-, Erkennungs- und Favon 4,8 km, 1,35 km bzw. 1 km umfasst. Das System wiegt 2,4 kg mit Batterien, die eine Laufzeit von 10 Stunden bieten. Nach Erhalt des Vertrags im Mai 2014 wurde das System bei der finnischen Armee in Dienst gestellt.
Vor einigen Jahren für das Soldatenmodernisierungsprogramm Soldato Futuro der italienischen Armee von Selex-ES entwickelt, wurde das multifunktionale Tag/Nacht-Aufklärungs- und Zielbestimmungsgerät Linx verbessert und verfügt nun über eine ungekühlte 640x480-Matrix. Der Wärmebildkanal hat ein Sichtfeld von 10°x7,5° mit optischer Vergrößerung x2,8 und elektronischer Vergrößerung x2 und x4. Der Tageskanal ist eine Farbkamera mit zwei Vergrößerungen (x3,65 und x11,75 mit entsprechenden Sichtfeldern 8,6°x6,5° und 2,7°x2,2°). Das programmierbare elektronische Absehen ist in das Farb-VGA-Display integriert. Die Entfernungsmessung ist bis zu 3 km möglich, die Standortbestimmung erfolgt über den eingebauten GPS-Empfänger, während ein digitaler Magnetkompass Peilinformationen liefert. Bilder werden über USB exportiert. Eine weitere Verfeinerung des Linx-Instruments wird im Laufe des Jahres 2015 mit der Einführung von gekühlten Miniatursensoren und neuen Funktionen erwartet.
In Israel versucht das Militär, seine Fähigkeit zur Feuerkooperation zu verbessern. Zu diesem Zweck wird jedem Bataillon eine Luftangriffskoordinierungs- und eine Bodenfeuerunterstützungsgruppe zugeteilt. Dem Bataillon ist derzeit ein Artillerie-Verbindungsoffizier zugeteilt. Die nationale Industrie arbeitet bereits daran, Werkzeuge für diese Aufgabe bereitzustellen.

Das Gerät Lisa der finnischen Firma Millog ist mit ungekühlten Wärmebild- und Tageslichtkanälen ausgestattet; bei einer Masse von nur 2,4 kg hat es eine Erfassungsreichweite von knapp 5 km

Das Coral-CR-Gerät mit gekühltem Wärmebildkanal gehört zur Produktlinie der Zielkennzeichnungssysteme der israelischen Firma Elbit
Elbit Systems ist sowohl in Israel als auch in den Vereinigten Staaten sehr aktiv. Das Beobachtungs- und Aufklärungsgerät Coral-CR verfügt über einen 640 x 512 gekühlten Indium-Antimonid-Detektor mittlerer Wellenlänge mit optischen Sichtfeldern von 2,5° x 2,0° bis 12,5° x 10° und 4-facher digitaler Vergrößerung. Die Schwarz-Weiß-CCD-Kamera mit Sichtfeldern von 2,5°x1,9° bis 10°x7,5° arbeitet im sichtbaren und nahen IR-Spektralbereich. Die Bilder werden auf einem hochauflösenden OLED-Farbdisplay durch eine einstellbare binokulare Optik angezeigt. Ein augensicherer Laser-Entfernungsmesser der Klasse 1, integriertes GPS und ein digitaler Magnetkompass mit einer Genauigkeit von 0,7° in Azimut und Höhe vervollständigen die Sensorsuite. Zielkoordinaten werden in Echtzeit berechnet und können an externe Geräte übertragen werden, das Gerät kann bis zu 40 Bilder speichern. CCIR- oder RS170-Videoausgänge sind verfügbar. Der Coral-CR ist 281 mm lang, 248 mm breit, 95 mm hoch und wiegt 3,4 kg einschließlich des wiederaufladbaren ELI-2800E-Akkus. Das Gerät ist in vielen NATO-Staaten im Einsatz (in Amerika unter der Bezeichnung Emerald-Nav).
Die ungekühlte Mars-Wärmebildkamera ist leichter und billiger und basiert auf einem 384x288-Vanadiumoxid-Detektor. Neben dem Wärmebildkanal mit zwei Sichtfeldern 6°x4,5° und 18°x13,5° verfügt es über eine eingebaute Farb-Tageskamera mit Sichtfeldern 3°x2,5° und 12°x10° , ein Laser-Entfernungsmesser, ein GPS-Empfänger und ein Magnetkompass. Das Mars-Instrument ist 200 mm lang, 180 mm breit und 90 mm hoch und wiegt mit Batterie nur 2 kg.
Strg Eintreten
Osch bemerkt s bku Text markieren und klicken Strg+Eingabe
Quanten-Entfernungsmesser.
4.1 Das Funktionsprinzip von Quantenentfernungsmessern.
Das Funktionsprinzip von Quanten-Entfernungsmessern basiert auf der Messung der Laufzeit eines Lichtimpulses (Signal) zum Ziel und zurück.
Bestimmung von Polarkoordinaten von Punkten;
Pflege von Zeroing-Targets (Erstellen von Benchmarks);
Studium der Gegend.

Reis. 13. DAK-2M in Kampfstellung.
1- Transceiver; 2-Winkelmessplattform (UIP); 3- Stativ; 4- Kabel;
5- Batterie 21NKBN-3.5.
4.2.2. Grundlegende Leistungsmerkmale DAK-2M
|
№№ |
Charakteristischer Name |
Indikatoren |
|
1 |
2 |
3 |
|
1 |
Reichweite und Maße, M: Minimum; Maximal; Bis zu Targets mit Winkelabmessungen ≥2′ |
8000 |
|
2 |
Maximaler Messfehler, m, nicht mehr |
10 |
|
3 |
Arbeitsmodus: Anzahl der Entfernungsmessungen in einer Serie; Messhäufigkeit; Pause zwischen Messreihen, min; Zeit der Bereitschaft zur Entfernungsmessung nach dem Einschalten, Sek., nicht mehr; Die Zeit, die nach dem Drücken der START-Taste im Bereitschaftsmodus für die Entfernungsmessung verbracht wird, min., nicht mehr. |
1 Messung in 5-7 Sekunden 30 1 |
|
4 |
Anzahl der Messungen (Impulse 0 ohne Nachladen des Akkus, nicht weniger als |
300 |
|
5 |
Richtwinkelbereich: |
± 4-50 |
|
6 |
Winkelmessgenauigkeit, d.c. |
±0-01 |
|
7 |
Optische Eigenschaften: Erhöhen Sie die Zeiten; Sichtfeld, Grad; Periskopität, mm. |
6 |
|
8 |
Essen: Spannung der Standardbatterie 21NKBN-3,5, v; Spannung von Nicht-Standard-Batterien, V; Spannung des Bordnetzes, V, (unter Einbeziehung einer Batterie mit einer Spannung von 22-29 V im Puffer. In diesem Fall sollten Spannungsschwankungen und Welligkeit ± 0,9 V nicht überschreiten). |
22-29 |
|
9 |
Gewicht des Entfernungsmessers: In Gefechtsstellung ohne Staukasten und Ersatzbatterie, kg; In der verstauten Position (eingestelltes Gewicht), kg |
|
|
10 |
Berechnung, pers. |
2 |
4.2.3. Set (Zusammensetzung) DAK-2M(Abb. 13)
Transceiver.
Winkelmessplattform (UIP).
Stativ.
Kabel.
Akku 21NKBN-3.5.
Einzelner Satz Ersatzteile.
Stapelbox.
Eine Reihe von technischen Unterlagen (Formular, TO und IE).
Das Gerät der Komponenten des DAK-2M.
Transceiver- zur Durchführung optischer (visueller) Aufklärung, Messung vertikaler Winkel, Erzeugung eines Lichtsondierungsimpulses, Empfang und Registrierung von Sondierungs- und von lokalen Objekten (Zielen) reflektierten Lichtimpulsen, Umwandlung in Spannungsimpulse, Erzeugung von Impulsen zum Starten und Stoppen des Zeitintervalls Meter (IVI).
a) Die Hauptblöcke und Knoten des Transceivers sind:
optischer Quantengenerator (OQG);
Photodetektorvorrichtung (FPU);
Verstärker FPU (UFPU);
Startblock;
Zeitintervallmesser (IVI);
Gleichstromwandler (DCC);
Zündeinheit (BP);
Gleichstromwandler (PPN);
Steuereinheit (BU);
Kondensatorblock (BC);
Ableiter;
Kopf;
Fernglas;
Mechanismus zum Zählen vertikaler Winkel.
WGC entwickelt, um einen starken eng gerichteten Strahlungsimpuls zu bilden. Die physikalische Grundlage der Laserwirkung ist die Verstärkung von Licht durch stimulierte Emission. Dazu verwendet der Laser ein aktives Element und ein optisches Pumpsystem.
FPU dient zum Empfangen von vom Ziel reflektierten Impulsen (reflektierte Lichtimpulse), deren Verarbeitung und Verstärkung. Um sie zu verstärken, weist die FPU einen vorgeschalteten Fotodetektorverstärker (UPFPU) auf.
UFPU dient zur Verstärkung und Verarbeitung von Impulsen, die von der UPFPU kommen, sowie zur Erzeugung von Stoppimpulsen für IVI.
BZ ist dazu ausgelegt, die Triggerimpulse des TIE und FPA zu erzeugen und den Startimpuls des TIE relativ zu dem Laserstrahlungsimpuls um die Zeit zu verzögern, die für den Durchgang von Stoppimpulsen durch die UPFPU und FPA erforderlich ist.
IV misst das Zeitintervall zwischen den Flanken des Auslösens und einem der drei Stoppimpulse. Umwandlung in einen numerischen Wert der Reichweite in Metern und Angabe der Entfernung zum Ziel sowie Angabe der Anzahl der Ziele im Strahlungsbereich.
TTX IVI:
Reichweite der gemessenen Entfernungen - 30 - 97500 m;
Auflösung nach D - nicht schlechter als 3 m;
Der Minimalwert des Messbereichs kann eingestellt werden:
1050 m ± 75 m
2025 m ± 75 m
3000m±75m
IV Misst die Entfernung zu einem von drei Zielen innerhalb der Reichweite der gemessenen Entfernungen nach Wahl des Bedieners.
PPT ist für einen Block von Pumpkondensatoren und Speicherkondensatoren des Netzteils sowie für die Ausgabe einer stabilisierten Versorgungsspannung an das Steuergerät vorgesehen.
BP ist dazu ausgelegt, einen Hochspannungsimpuls zu bilden, der die Entladungsstrecke einer gepulsten Pumplampe ionisiert.
PPN ist dazu ausgelegt, eine stabilisierte Versorgungsspannung an die UPFPU, UFPU, BZ auszugeben und die Drehzahl des Elektromotors des opto-mechanischen Verschlusses zu stabilisieren.
BOO dient dazu, den Betrieb von Einheiten und Einheiten des Entfernungsmessers in einer bestimmten Reihenfolge zu steuern und den Spannungspegel der Stromquelle zu steuern.
BC entworfen, um Ladung zu speichern.
Entlader Entwickelt, um die Ladung von den Kondensatoren zu entfernen, indem sie mit dem Körper des Transceivers kurzgeschlossen werden.
Kopf zur Aufnahme eines Visierspiegels ausgelegt. An der Spitze des Kopfes befindet sich ein Schlitz zum Anbringen einer Zielstange. Zum Schutz des Kopfglases ist eine Gegenlichtblende angebracht.
Fernglas ist ein Teil des Absehens und dient dazu, das Gelände zu beobachten, auf das Ziel zu zielen, sowie die Angaben der Entfernungsmesser, des Zielzählers, der Bereitschaft des Entfernungsmessers zur Entfernungsmessung und des Zustands des Ziels abzulesen Batterie.
Referenzmechanismus für den vertikalen Winkel
dient zum Zählen und Anzeigen gemessener Vertikalwinkel.
b) Optisches Schema des Transceivers(Abb.14)
besteht aus: - Sendekanal;
Die optischen Kanäle des Empfängers und des Fadenkreuzes fallen teilweise zusammen (sie haben ein gemeinsames Objektiv und einen dichroitischen Spiegel).
Senderkanal Entwickelt, um einen starken monochromatischen Impuls von kurzer Dauer und kleiner Winkeldivergenz des Strahls zu erzeugen und ihn in Richtung des Ziels zu senden.
Seine Zusammensetzung: - OGK (Spiegel, Blitzlampe, aktives Stabelement, Reflektor, Prisma);
Teleskopsystem von Galileo - um die Winkeldivergenz der Strahlung zu reduzieren.

 Empfängerkanal
entwickelt, um den vom Ziel reflektierten Strahlungsimpuls zu empfangen und die erforderliche Lichtenergie auf der FPU-Fotodiode zu erzeugen. Seine Zusammensetzung: - Linse; - dichroitischer Spiegel.
Empfängerkanal
entwickelt, um den vom Ziel reflektierten Strahlungsimpuls zu empfangen und die erforderliche Lichtenergie auf der FPU-Fotodiode zu erzeugen. Seine Zusammensetzung: - Linse; - dichroitischer Spiegel.
Reis. vierzehn. Optisches Schema des Transceivers.
Links: 1-Teleskop; 2- Spiegel; 3- aktives Element; 4- Reflektor; 5- Blitzlampe ISP-600; 6-Prisma; 7.8 - Spiegel; 9- Okular.
Stecker "POWER";
PSA-Anschluss (zum Anschließen eines Rechengeräts);
Trocknungsventil.
Auf dem Kopf des Transceivers befinden sich:
Trocknungsventil;
Fassung für Zielstange.
TARGET-Schalter ist dazu ausgelegt, die Entfernung zu dem ersten oder zweiten oder dritten Ziel zu messen, das sich im Strahlungsbereich befindet.
GATE-Schalter wurde entwickelt, um die Mindestbereiche 200, 400, 1000, 2000, 3000 einzustellen, näher als diese Entfernungsmessung unmöglich ist. Die angegebenen Mindestreichweiten entsprechen den Stellungen des „STROBING“-Schalters:
400 m - "0,4"
1000 m - "1"
2000 m - "2"
3000 m - "3"
Wenn die Schalterstellung „STROBING“ auf Position „3“ gestellt wird, wird die Empfindlichkeit des Fotodetektors auf reflektierte Signale (Impulse) erhöht.

Reis. fünfzehn. DAK-2M steuert.
1 - Trockenpatrone; 2-Knoten-Rasterbeleuchtung; 3-Schalter LICHTFILTER; 4-Schalter ZWECK; 5.13-Klammer; 6-Bedienfeld; 7-Tasten-MESSUNG; 8-Tasten-START; 9-Regler HELLIGKEIT; 10-Kippschalter HINTERGRUNDBELEUCHTUNG; 11-Kippschalter POWER; 12-polige PARAMETERSTEUERUNG ; 14-Schalter-STROBING; 15-stufig; 16-Reflektor; Mechanismus mit 17 Skalen zum Ablesen vertikaler Winkel.


Reis. 16. DAK-2M steuert.
Links: 1-Riemen; 2-Sicherung; 3-polige LATERNE; 4-Bedienfeld; 5-Ring; PSA mit 6 Anschlüssen; 7,11-Ringe; 8-poliges Netzteil; 9-Tasten-KALIBRIERUNG; 10-Tasten CHECK VOLT.
Rechts: 1-fach; 2-Kopf; 3.9-Trockenventil; 4-Körper; 5-Augenmuschel; 6-Fernglas; Vertikalführung mit 7 Griffen; 8-Klammer.
Winkelmessplattform (UIP)
UIP zum Montieren und Nivellieren des Transceivers, zum Drehen um eine vertikale Achse und zum Messen von Horizontal- und Richtungswinkeln.
Zusammensetzung der UIP(Abb.17)
Klemmvorrichtung;
Gerät;
Kugelebene.
Das UIP wird auf einem Stativ montiert und durch die Gewindebuchse mit einer Stellschraube befestigt.

Reis. 17. Winkelmessplattform DAK-2M.
1-Griff zum Schichten des Wurms; 2-stufig; 3-Griff; 4 Spannvorrichtung; 5-Fuß mit Rad; 6-Trommel; 7-Griff für präzise Führung; 8-Mutter; 9 Gliedmaßen; 10-Griff; 11-Gewinde-Hülse; 12-Basis; 13-Hebeschraube.
Stativ für die Installation des Transceivers vorgesehen, um den Transceiver in der Arbeitsposition in der erforderlichen Höhe zu installieren. Das Stativ besteht aus einem Tisch, drei gepaarten Stangen und drei einziehbaren Beinen. Die Stäbe sind durch ein Scharnier und eine Klemmvorrichtung miteinander verbunden, in der das einziehbare Bein mit einer Schraube festgeklemmt wird. Die Scharniere werden mit Auflagen am Tisch befestigt.
Batterie 21 NKBN-3.5 wurde entwickelt, um Entfernungsmesserblöcke mit Gleichstrom über ein Kabel zu versorgen.
NK - Nickel-Cadmium-Batteriesystem;
B - Batterietyp - ohne Panel;
H - technologisches Merkmal der Plattenherstellung - Verbreitung;
3,5 - Nennkapazität der Batterie in Amperestunden.
 - Schaltflächen "MESSUNG 1" und "MESSUNG 2" - zum Messen der Entfernung zum ersten oder zweiten Ziel, das sich im Strahlungsbereich befindet.
- Schaltflächen "MESSUNG 1" und "MESSUNG 2" - zum Messen der Entfernung zum ersten oder zweiten Ziel, das sich im Strahlungsbereich befindet.
 Reis. zwanzig. Kontrollen von LPR-1.
Reis. zwanzig. Kontrollen von LPR-1.
Oben: 1-Gehäuse; 2-Griff; 3-Index; 4-Tasten MEASUREMENT1 und MEASUREMENT 2; 5-Riemen; 6-teilig; 7-Wege-Schaltergriff LIGHT; 8 Okularvisier; 9 Schrauben; 10 Okularvisier; 11-Gabel; 12-Batteriefachabdeckung; 13-Kippschalter Griff ON-OFF.
Unten: 1 Trockenpatrone; 2-Männer; 3 Klammern; 4-Deckel.
Auf der Rückseite und Unterseite:
Halterung zur Befestigung des Geräts an der UID-Halterung oder an der Halterung - Adapter bei der Installation des Geräts am Kompass;
trocknende Patrone;
Sucherobjektiv;
Teleskoplinse;
Stecker mit Abdeckung zum Anschließen des Kabels der Fernbedienungstasten.


Reis. 21. Sichtfeld des LPR-1-Indikators
1-Bereichsanzeige; 2,5,6-Dezimalpunkte; 3 Bereitschaftsanzeige (grün); 4-Batterieentladeanzeige (rot).
Notiz . In Abwesenheit eines reflektierten Impulses werden Nullen (00000) in allen Ziffern der Reichweitenanzeige angezeigt. Bei fehlendem Tastimpuls werden in allen Ziffern der Bereichsanzeige Nullen und in der dritten Ziffer ein Dezimalpunkt angezeigt (Abb. 21, Stelle 5).
Befinden sich während der Messung mehrere Ziele im Strahlungsziel (im Bruch des Winkelrasters), leuchtet der Dezimalpunkt in der niederwertigen Stelle der Entfernungsanzeige (Abb. 21. Position 2).
Wenn es nicht möglich ist, Abschirmstörungen über die Unterbrechung des goniometrischen Gitters hinaus zu entfernen, und auch in Fällen, in denen keine Störungen beobachtet werden und der Dezimalpunkt in der unteren (rechten) Ziffer der Entfernungsanzeige leuchtet, richten Sie den Entfernungsmesser auf das Ziel damit sich das Ziel ggf. überschneidet großes Gebiet Bruch des goniometrischen Gitters. Messen Sie die Reichweite, stellen Sie dann den minimalen Bereichsbegrenzungsknopf auf einen Bereichswert ein, der den gemessenen Wert um 50-100 Meter überschreitet, und messen Sie die Reichweite erneut. Wiederholen Sie diese Schritte, bis der Dezimalpunkt der höchstwertigen Stelle erlischt.
Wenn in allen Stellen der Bereichsanzeige Nullen angezeigt werden und der Dezimalpunkt in der höchstwertigen Stelle (links) (Abb. 21. Position 6) der Anzeige leuchtet, muss der minimal gemessene Bereich durch Drehen des Minimums verringert werden Bereichsbegrenzungsknopf, bis ein zuverlässiges Messergebnis erzielt wird.
2. Winkelmessgerät
(Abb.22.).
Entwickelt für die Installation eines Entfernungsmessers, das Zielen eines Entfernungsmessers und das Messen von horizontalen, vertikalen und Richtungswinkeln

19
zu Favoriten zu Favoriten von Favoriten 8
Liebe Kolleginnen und Kollegen, da der Hauptheld „ein Artillerieoffizier ist, musste Ihr gehorsamer Diener in der Zeit kurz vor Beginn des Ersten Weltkriegs ein wenig von den Fragen der Feuerleitung verstehen. Wie ich vermutete, stellte sich die Frage als f-ski kompliziert heraus, aber ich schaffte es trotzdem, einige Informationen zu sammeln. Dieses Material erhebt in keiner Weise den Anspruch auf Vollständigkeit und Vollständigkeit, es ist nur ein Versuch, alle mir vorliegenden Fakten und Vermutungen zusammenzutragen.
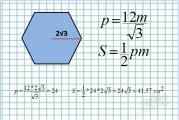
Versuchen wir "an den Fingern", die Merkmale des Artilleriefeuers zu verstehen. Um die Waffe auf das Ziel zu richten, müssen Sie sie mit dem richtigen Visier (vertikaler Ausrichtungswinkel) und Kimme (horizontaler Ausrichtungswinkel) einstellen. Im Wesentlichen kommt es bei der Installation des richtigen Visiers und der richtigen Kimme auf die ganze kunstvolle Wissenschaft der Artillerie an. Allerdings ist es leicht zu sagen, aber schwer zu tun.
Der einfachste Fall ist, wenn unsere Waffe stationär ist und auf ebenem Boden steht und wir dasselbe stationäre Ziel treffen müssen. In diesem Fall reicht es anscheinend aus, die Waffe so zu richten, dass der Lauf direkt auf das Ziel blickt (und wir haben das richtige Visier), um die genaue Entfernung zum Ziel zu ermitteln. Dann können wir mithilfe der Artillerietabellen den Höhenwinkel (Visier) berechnen, ihn der Waffe und dem Boom geben! Treffen wir das Ziel.
Tatsächlich ist dies natürlich nicht der Fall - wenn das Ziel weit genug entfernt ist, müssen Sie Korrekturen für den Wind, die Luftfeuchtigkeit, den Verschleißgrad der Waffe, die Temperatur des Schießpulvers usw. vornehmen. usw. - und auch danach, wenn das Ziel nicht zu groß ist, müssen Sie es ordentlich aus der Kanone ausstechen, da leichte Abweichungen in Form und Gewicht der Geschosse sowie Gewicht und Qualität der Ladungen auftreten , wird immer noch zu einer bekannten Streuung von Treffern führen (Ellipsenstreuung). Aber wenn wir eine bestimmte Anzahl von Projektilen abfeuern, werden wir nach dem Gesetz der Statistik am Ende definitiv das Ziel treffen.
Aber wir lassen das Problem der Korrekturen vorerst beiseite und betrachten die Waffe und das Ziel als solche kugelförmigen Pferde in einem Vakuum. Angenommen, es wird auf einer absolut ebenen Fläche geschossen, bei immer gleicher Luftfeuchtigkeit, kein Luftzug, die Waffe ist aus prinzipiell nicht ausbrennendem Material usw. usw. In diesem Fall reicht es beim Schießen mit einer stationären Waffe auf ein stationäres Ziel wirklich aus, die Entfernung zum Ziel zu kennen, was uns den Winkel des vertikalen Zielens (Visier) und die Richtung zu ihm (Visier) gibt.
Was aber, wenn das Ziel oder die Waffe nicht stationär ist? Wie ist es zum Beispiel in der Marine? Die Waffe befindet sich auf einem Schiff, das sich irgendwo mit einer bestimmten Geschwindigkeit bewegt. Sein Tor, widerlich, steht auch nicht still, es kann in absolut jedem Winkel zu unserem Kurs gehen. Und das mit absolut jeder Geschwindigkeit, die ihrem Kapitän nur in den Sinn kommt. Was dann?
Da sich der Feind im Weltraum bewegt und wir berücksichtigen, dass wir nicht von einem Turbolaser schießen, der das Ziel sofort trifft, sondern von einer Waffe, deren Projektil einige Zeit braucht, um das Ziel zu erreichen, müssen wir eine nehmen führen, d.h. Schießen Sie nicht dort, wo sich das feindliche Schiff zum Zeitpunkt des Schusses befindet, sondern dort, wo es in 20 bis 30 Sekunden sein wird, wenn sich unser Projektil nähert.
Es scheint auch einfach zu sein - schauen wir uns das Diagramm an.

Unser Schiff befindet sich am Punkt O, das feindliche Schiff am Punkt A. Wenn unser Schiff am Punkt O aus einer Kanone auf den Feind schießt, bewegt sich das feindliche Schiff, während das Projektil fliegt, zum Punkt B. Dementsprechend wird Während des Fluges des Projektils ändert sich Folgendes:
- Entfernung zum Zielschiff (war OA, wird zu OB);
- Peilung zum Ziel (es gab einen S-Winkel, aber es wird ein D-Winkel)
Um die Korrektur des Visiers zu bestimmen, reicht es dementsprechend aus, die Differenz zwischen der Länge der Segmente OA und OB zu kennen, d. h. den Betrag der Entfernungsänderung (im Folgenden - VIR). Und um die Korrektur des Visiers zu bestimmen, reicht es aus, den Unterschied zwischen den Winkeln S und D zu kennen, d.h. der Wert der Lageränderung
- Entfernung zum Zielschiff (OA);
- Zielpeilung (Winkel S);
- Zielkurs;
- Zielgeschwindigkeit.
Betrachten wir nun, wie die zur Berechnung von VIR und VIP erforderlichen Informationen erhalten wurden.
1. Entfernung zum Zielschiff - offensichtlich laut Entfernungsmesser. Und noch besser - mehrere Entfernungsmesser, am besten mindestens drei. Dann kann der am stärksten abweichende Wert verworfen und aus den beiden anderen der arithmetische Mittelwert gebildet werden. Effizienter ist natürlich die Entfernungsbestimmung mit mehreren Entfernungsmessern.
2. Peilung des Ziels (Kurswinkel, wenn Sie möchten) - mit der Genauigkeit von "halben Fingerspitzen" wird von jedem Goniometer bestimmt, aber für eine genauere Messung ist es wünschenswert, ein Visiergerät zu haben - ein Gerät mit hochwertige Optik, die in der Lage ist (einschließlich) die Kurswinkelziele sehr genau zu bestimmen. Bei Zielfernrohren, die für zentrales Zielen vorgesehen sind, wurde die Position des Zielschiffs mit einem Fehler von 1-2 Divisionen des Visiers eines Artilleriegeschützes bestimmt (d. H. 1-2 Tausendstel einer Entfernung, bei einer Entfernung von 90 kbt die Position des Schiffes wurde mit einer Genauigkeit von 30 Metern bestimmt)
3. Zielkurs. Dafür waren bereits arithmetische Berechnungen und spezielle Artillerie-Ferngläser mit darauf angebrachten Teilungen erforderlich. Es wurde so gemacht - zuerst musste das Zielschiff identifiziert werden. Denken Sie an seine Länge. Messen Sie den Abstand dazu. Rechnen Sie die Länge des Schiffes in die Anzahl der Teilungen auf dem Artillerie-Fernglas für eine bestimmte Entfernung um. Diese. rechnen Sie: "Sooo, die Länge dieses Schiffes beträgt 150 Meter, für 70 kbt sollte ein 150 Meter langes Schiff 7 Divisionen eines Artillerie-Fernglases belegen." Schauen Sie sich danach das Schiff durch ein Artillerie-Fernglas an und stellen Sie fest, wie viele Divisionen es dort tatsächlich einnimmt. Wenn das Schiff beispielsweise 7 Felder belegt, bedeutet dies, dass es uns mit der ganzen Seite zugewandt ist. Und wenn es weniger ist (sagen wir - 5 Divisionen) - bedeutet dies, dass sich das Schiff in einem bestimmten Winkel zu uns befindet. Das Rechnen ist wiederum nicht allzu schwierig - wenn wir die Länge des Schiffes kennen (also die Hypotenuse AB, im Beispiel ist es 7) und wir die Länge seiner Projektion mit Hilfe eines Fernglases bestimmt haben (also das Bein AC im Beispiel ist Länge 5), dann ist die Berechnung des Winkels S eine Frage des Lebens.

Das einzige, was ich hinzufügen möchte, ist, dass die Rolle eines Artillerie-Fernglases von demselben Visier übernommen werden könnte
4. Zielgeschwindigkeit. Das war jetzt schwieriger. Im Prinzip könnte die Geschwindigkeit „mit dem Auge“ (mit angemessener Genauigkeit) geschätzt werden, aber sie kann natürlich genauer sein - wenn Sie die Entfernung zum Ziel und seinen Kurs kennen, können Sie das Ziel beobachten und seine Wibestimmen - d.h. wie schnell sich die Peilung zum Ziel ändert. Außerdem wird die vom Schiff zurückgelegte Strecke bestimmt (auch hier muss nichts Komplizierteres als rechtwinklige Dreiecke betrachtet werden) und seine Geschwindigkeit.
Hier kann man sich jedoch fragen - warum müssen wir zum Beispiel alles so kompliziert machen, wenn wir die Änderungen in VIP einfach messen können, indem wir das Zielschiff in Sichtweite beobachten? Aber hier ist die Sache, dass die Änderung des VIP nicht linear ist und daher die Daten aktueller Messungen schnell veraltet sind.
Die nächste Frage ist, was wir von einem Feuerleitsystem (FCS) erwarten. Aber was.
Das SLA soll folgende Daten erhalten:
- Entfernung zum feindlichen Zielschiff und Peilung dazu;
- Kurs und Geschwindigkeit des eigenen Schiffes.
Gleichzeitig müssen die Daten natürlich schnellstmöglich ständig aktualisiert werden.
- Der Kurs und die Geschwindigkeit des feindlichen Zielschiffs;
- Wandeln Sie den Kurs/die Geschwindigkeiten in ein Modell der Bewegung von Schiffen (eigene und feindliche) um, mit dessen Hilfe Sie die Position der Schiffe vorhersagen können;
- Zündblei unter Berücksichtigung von VIR, VIP und Projektilflugzeit;
- Visier und Kimme unter Berücksichtigung von Blei (unter Berücksichtigung aller Arten von Korrekturen (Schießpulvertemperatur, Wind, Feuchtigkeit usw.)).
Der FCS muss das Visier und die Kimme von der Abgabevorrichtung in den Turm (zentraler Posten) übertragen Artilleriegeschütze so dass die Funktionen der Kanoniere mit den Kanonen minimal sind (idealerweise werden die eigenen Visiere der Kanonen überhaupt nicht verwendet).
Das SLA muss das Salvenfeuer der vom Oberartilleristen ausgewählten Geschütze zu dem von ihm gewählten Zeitpunkt sicherstellen.
Artillerie-Feuerleitgeräte arr 1910 von N.K. Geisler & K

Sie wurden auf russischen Dreadnoughts (sowohl in der Ostsee als auch im Schwarzen Meer) installiert und enthielten viele Mechanismen für verschiedene Zwecke. Alle Geräte können in Geben (in das Daten eingegeben wurden) und Empfangen (das einige Daten ausgab) unterteilt werden. Zusätzlich zu ihnen gab es viele Hilfsgeräte, die den Betrieb des Rests sicherstellten, aber wir werden nicht darüber sprechen, wir werden die wichtigsten auflisten:
Instrumente zur Übertragung von Entfernungsmesserwerten
Spender - befindet sich in der Entfernungsmesserkabine. Sie hatten eine Skala, mit der Sie die Entfernung von 30 bis 50 kbt mit einer Genauigkeit von einem halben Kabel, von 50 bis 75 kbt - 1 Kabel und von 75 bis 150 kbt - 5 Kabel einstellen konnten. Nachdem der Bediener die Entfernung mit einem Entfernungsmesser bestimmt hat, stellt er den entsprechenden Wert manuell ein
Die Empfänger, die sich im Turm und in der CPU befanden, hatten genau das gleiche Zifferblatt wie die Geber. Sobald der Bediener des abgebenden Geräts einen bestimmten Wert einstellte, spiegelte sich dieser sofort auf dem Ziffernblatt des empfangenden Geräts wider.
Geräte zur Übermittlung der Richtung von Zielen und Signalen

Ziemlich lustige Geräte, deren Aufgabe darin bestand, das Schiff anzuzeigen, auf das geschossen werden sollte (aber keineswegs die Peilung auf diesem Schiff), und es wurden Befehle zur Art des Angriffs "Schuss / Angriff / Nullpunkt / Salve / Schnellfeuer" erteilt.
Die Spender befanden sich im Kommandoturm, die Empfänger an jeder Kasemattenkanone und eine für jeden Turm. Sie funktionierten ähnlich wie Instrumente zur Übertragung von Entfernungsmesserwerten.
Gesamte Geräte (Geräte zur Übertragung einer horizontalen Sicht)
Hier beginnen die Unklarheiten. Mit den Gebergeräten ist alles mehr oder weniger klar - sie befanden sich im Kommandoturm und hatten eine Skala von 140-Teilungen, die den Teilungen der Visiereinrichtungen entsprachen (d. H. 1 Teilung - 1/1000 der Entfernung). Die Empfangsgeräte wurden platziert direkt auf das Visier der Geschütze. Das System funktionierte so - der Bediener des Ausgabegeräts im Kommandoturm (CPU) stellte einen bestimmten Wert auf der Skala ein. Dementsprechend wurde auf den Empfangsgeräten der gleiche Wert angezeigt, wonach der Schütze die Aufgabe hatte, die Visiermechanismen zu drehen, bis das horizontale Zielen der Waffe mit dem Pfeil auf dem Gerät übereinstimmte. Dann - es scheint durchbrochen zu sein, die Waffe ist richtig gerichtet
Es besteht der Verdacht, dass das Gerät nicht den Winkel des horizontalen Visiers ausgab, sondern nur eine Bleikorrektur. Nicht verifiziert.
Vorrichtungen zum Übertragen der Visierhöhe
Die komplexeste Einheit
Gebende Geräte befanden sich im Kommandoturm (CPU). Das Gerät gab manuell Daten über die Entfernung zum Ziel und VIR (den Betrag der Entfernungsänderung, falls jemand es vergessen hat) ein, woraufhin dieses Gerät dort anfing, auf etwas zu klicken und die Entfernung zum Ziel in der aktuellen Zeit auszugeben. Diese. Das Gerät addiert / subtrahiert selbstständig die VIR von der Entfernung und übermittelt diese Information an die empfangenden Geräte.
Die Empfangsgeräte sowie die Empfangsgeräte wurden an den Visieren der Waffen montiert. Aber es war nicht die Entfernung, die ihnen auffiel, sondern der Anblick. Diese. Geräte zur Übertragung der Visierhöhe wandelten die Entfernung selbstständig in den Visierwinkel um und gaben sie an die Waffen weiter. Der Prozess lief kontinuierlich, d.h. Zu jedem Zeitpunkt zeigte der Pfeil des Empfangsgeräts die tatsächliche Sicht im aktuellen Moment. Außerdem war es möglich, Korrekturen in der Empfangseinrichtung dieses Systems (durch Anschluss mehrerer Exzenter) vorzunehmen. Diese. Wenn zum Beispiel die Waffe stark geschossen wurde und ihre Schussreichweite im Vergleich zur neuen um beispielsweise 3 kbt abfiel, reichte es aus, den entsprechenden Exzenter zu installieren - jetzt auf den vom Abgabegerät übertragenen Visierwinkel. Speziell für diese Waffe wurde ein Winkel hinzugefügt, um das Unterschwingen mit drei Kabeln auszugleichen Dies waren individuelle Korrekturen für jede Waffe.
Genau nach dem gleichen Prinzip war es möglich, Anpassungen für die Temperatur des Schießpulvers (es wurde gleich der Temperatur in den Kellern gemessen) sowie Anpassungen für die Art der Ladung / des Projektils "Training / Kampf / Praktisch" einzuführen.
Aber das ist nicht alles.
Tatsache ist, dass die Genauigkeit der Visierinstallation „plus oder minus einer Straßenbahnhaltestelle, angepasst an den Azimut des Nordsterns“ betrug. Sowohl bei der Entfernung zum Ziel als auch bei der Größe des VIR war es leicht, einen Fehler zu machen. Besonderer Zynismus bestand auch darin, dass die Reichweite der Entfernungsmesser immer mit einer gewissen Verzögerung kam. Tatsache ist, dass der Entfernungsmesser zu Beginn der Messung die Entfernung zum Objekt ermittelt hat. Aber um diesen Bereich zu bestimmen, musste er eine Reihe von Aktionen ausführen, darunter „das Bild kombinieren“ usw. Das alles hat einige Zeit gedauert. Es dauerte etwas länger, eine bestimmte Entfernung zu melden und ihren Wert auf dem Gebergerät einzustellen, um die Entfernungsmesserwerte zu übertragen. So sah der leitende Artillerieoffizier nach verschiedenen Quellen auf dem Empfangsgerät zur Übermittlung von Entfernungsmesserwerten nicht die aktuelle Entfernung, sondern die, die fast eine Minute zurückliegt.
Das gebende Gerät zur Übertragung der Visierhöhe gab dem leitenden Artilleristen daher die größten Möglichkeiten dafür. Während des Betriebs des Geräts konnte jederzeit manuell eine Korrektur für die Reichweite oder für die Größe des VIR eingegeben werden, und das Gerät rechnete ab dem Zeitpunkt der Eingabe der Korrektur weiter und berücksichtigte diese bereits. Es war möglich, das Gerät komplett auszuschalten und die Sichtwerte manuell einzustellen. Und es war auch möglich, die Werte in einem "Ruck" einzustellen - dh. Wenn unser Gerät beispielsweise eine Sicht von 15 Grad anzeigt, können wir drei Salven hintereinander abfeuern - bei 14, bei 15 und bei 16 Grad, ohne auf den Fall der Granaten zu warten und ohne Entfernungs- / VIR-Korrekturen einzuführen, aber die die Grundeinstellung der Maschine geht nicht verloren.
Und endlich,
Heuler und Anrufe
Gebende Geräte befinden sich im Kommandoturm (CPU) und die Heuler selbst - eines für jede Waffe. Wenn der Feuerleiter eine Salve abfeuern will, schließt er die entsprechenden Stromkreise und die Kanoniere feuern Schüsse auf die Geschütze ab.
Von einem vollwertigen SLA kann man leider absolut nicht sprechen. Wieso den?
- Geislers OMS hatte kein Gerät, um die Peilung zum Ziel zu bestimmen (es gab keine Sicht);
- Es gab kein Instrument, das ihren Kurs und die Geschwindigkeit des Zielschiffs berechnen konnte. Nachdem also die Entfernung (vom Gerät zur Übertragung von Entfernungsmesserwerten) empfangen und die Peilung mit improvisierten Mitteln bestimmt worden war, musste alles andere manuell berechnet werden.
- Es gab auch keine Instrumente, um den Kurs und die Geschwindigkeit des eigenen Schiffes zu bestimmen - sie mussten auch auf "improvisierte Weise" beschafft werden, dh nicht im Geisler-Baukasten enthalten sein;
- Es gab kein Gerät zur automatischen Berechnung von VIR und VIP - d.h. Nachdem sie die Kurse / Geschwindigkeiten ihres eigenen Schiffes und ihrer Ziele erhalten und berechnet hatten, war es notwendig, sowohl den VIR als auch den VIP erneut manuell zu berechnen.
Trotz des Vorhandenseins sehr fortschrittlicher Geräte, die die Höhe des Visiers automatisch berechnen, erforderte Geislers OMS immer noch sehr viele manuelle Berechnungen - und das war nicht gut.
Geislers SLA schloss die Verwendung von Zielfernrohren durch Kanoniere nicht aus und konnte dies auch nicht ausschließen. Tatsache ist, dass die automatische Visierhöhe die Visierhöhe berechnet hat ... natürlich für den Moment, in dem das Schiff auf ebenem Kiel liegt. Und das Schiff erfährt sowohl Stampfen als auch Rollen. Und das hat Geislers SLA überhaupt und in keiner Weise berücksichtigt. Daher gibt es eine der Wahrheit sehr ähnliche Annahme, dass die Aufgabe des Schützen der Waffe ein solches „Verdrehen“ des Pickups beinhaltete, das es ermöglichen würde, das Stampfen des Schiffes auszugleichen. Es ist klar, dass es notwendig war, sich ständig zu "drehen", obwohl Zweifel bestehen, dass die 305-mm-Kanonen manuell "stabilisiert" werden könnten. Wenn ich richtig liege, dass Geislers FCS nicht den horizontalen Zielwinkel, sondern nur die Führung übermittelt hat, dann hat der Schütze jeder Waffe seine Waffe unabhängig in der horizontalen Ebene ausgerichtet und nur auf Befehl von oben die Führung übernommen.
Geislers SLA erlaubte Salvenfeuer. Aber der hochrangige Artillerist konnte keine gleichzeitige Salve geben - er konnte geben Sie das Signal, das Feuer zu eröffnen, Es ist nicht das Gleiche. Diese. Stellen Sie sich ein Bild vor - vier Türme von "Sewastopol", in jedem Kanoniere "verdrehen" Sie die Visiere und kompensieren Sie das Nicken. Plötzlich - Heuler! Jemand hat eine normale Sicht, er schießt und jemand hat es noch nicht vermasselt, er dreht es, feuert einen Schuss ab ... und ein Unterschied von 2-3 Sekunden erhöht die Streuung von Granaten erheblich. Ein Signal zu geben bedeutet also nicht, eine einmalige Salve zu erhalten.
Aber hier ist, was Geislers OMS wirklich gut gemacht hat – es war die Übertragung von Daten von den Gebergeräten im Kommandoturm zu den Empfangsgeräten an den Geschützen. Hier gab es keine Probleme und das System erwies sich als sehr zuverlässig und schnell.
Mit anderen Worten, die Geisler-Geräte des Modells von 1910 waren nicht so sehr ein OMS, sondern eine Möglichkeit, Daten vom Glavart zu den Waffen zu übertragen (obwohl das Vorhandensein einer automatischen Berechnung der Visierhöhe das Recht gibt, Geisler zuzuschreiben zum OMS).
In Ericksons MSA erschien ein Visiergerät, das mit einem elektromechanischen Gerät verbunden war, das den horizontalen Zielwinkel ausgab. Anscheinend führte die Drehung des Visiers zu einer automatischen Verschiebung der Pfeile auf den Visieren der Kanonen.
Es gab 2 zentrale Kanoniere in Ericksons MSA, einer von ihnen war mit horizontalem Zielen beschäftigt, der zweite - vertikal, und sie (und nicht die Kanoniere) berücksichtigten den Nickwinkel - dieser Winkel wurde ständig gemessen und addiert Zielwinkel auf einem geraden Kiel. So mussten die Kanoniere ihre Waffen nur so drehen, dass Visierung und Kimme den Werten der Pfeile auf der Visierung entsprachen. Der Schütze musste nicht mehr in das Visier schauen.
Im Allgemeinen sieht der Versuch, mit dem Nicken „mitzuhalten“, indem man die Waffe manuell stabilisiert, seltsam aus. Es wäre viel einfacher, das Problem mit einem anderen Prinzip zu lösen – einem Gerät, das den Stromkreis schließt und einen Schuss abfeuert, wenn das Schiff auf ebenem Kiel liegt. In Russland gab es Nicksteuerungsgeräte, die auf dem Betrieb des Pendels basierten. Aber leider hatten sie eine Menge Fehler und konnten nicht für Artilleriefeuer verwendet werden. Um die Wahrheit zu sagen, die Deutschen hatten ein solches Gerät erst nach Jütland, und Erickson lieferte immer noch Ergebnisse, die nicht schlechter waren als die "manuelle Stabilisierung".
Das Volleyfeuer wurde nach einem neuen Prinzip durchgeführt - jetzt, als die Kanoniere im Turm bereit waren, drückten sie ein spezielles Pedal, und der leitende Kanonier schloss den Stromkreis, indem er sein eigenes Pedal im Kommandoturm (CPU) als Türme drückte wir sind bereit. Diese. Volleys wurden wirklich einmalig.
Ob Erickson Geräte zur automatischen Berechnung von VIR und VIP hatte - ich weiß es nicht. Aber was ist sicher bekannt - ab 1911-1912. Ericksons OMS war tragischerweise unvorbereitet. Die Übertragungsmechanismen von den Gebern zu den Empfängern funktionierten nicht gut. Der Prozess dauerte viel länger als in Geislers OMS, aber es traten ständig Mismatches auf. Die Rollleiteinrichtungen arbeiteten zu langsam, so dass Visier und Kimme der Mittelschützen mit der Rolle „nicht mithielten“ – mit entsprechenden Folgen für die Schussgenauigkeit. Was war zu tun?
Die russische kaiserliche Marine folgte einem ziemlich originellen Weg. Das Geisler-System, Modell 1910, wurde auf den neuesten Schlachtschiffen installiert, und da es von der gesamten FCS nur Sichthöhenberechnungsgeräte gab, wurde anscheinend beschlossen, nicht zu warten, bis Ericksons FCS in Erinnerung gerufen wurde, und nicht zu versuchen, eine neue zu kaufen FCS (z. B. von den Briten) komplett, sondern die fehlenden Geräte zu beschaffen / in Erinnerung zu rufen und das Geisler-System einfach damit zu ergänzen.
Eine interessante Sequenz wird von Mr. Serg auf Tsushima gegeben: http://tsushima.su/forums/viewtopic.php?id=6342&p=1
Am 11. Januar beschloss MTK, das Erickson-System in Sevakh zu installieren.
12. Mai Erickson ist nicht bereit, ein Vertrag mit Geisler wird unterschrieben.
Am 12. September wurde mit Erickson ein Vertrag über die Installation zusätzlicher Instrumente unterzeichnet.
13. September Erickson stellte das Pollen- und AVP-Geisler-Instrument fertig.
14. Januar, Installation eines Satzes von Pollens Instrumenten auf dem PV.
Am 14. Juni wurden die Tests von Pollens Geräten auf PV abgeschlossen
15. Dezember Vertragsabschluss über die Entwicklung und Installation einer Zentralheizungsanlage.
Am 16. Herbst wurde die Installation der Zentralheizung abgeschlossen.
17g Schießen mit CN.
Infolgedessen ist die SLA unseres "Sewastopols" sogar zu einem Sammelsurium geworden. Die VIR- und VIP-Rechenmaschinen wurden von Engländern geliefert, die von Pollan gekauft wurden. Die Sehenswürdigkeiten sind in Erickson. Die Maschine zur Berechnung der Visierhöhe war zunächst Geisler, dann ersetzt durch Erickson. Um die Kurse zu bestimmen, wurde ein Kreisel installiert (aber nicht die Tatsache, dass im Ersten Weltkrieg, vielleicht später ...) Im Allgemeinen erhielt unser Sewastopol um 1916 ein für diese Zeit absolut erstklassiges zentrales Zielsystem.
Und was ist mit unseren eingeschworenen Freunden?
Es scheint, dass der beste Weg nach Jütland mit den Briten war. Die Jungs von der Insel haben sich den sogenannten "Dreyer-Tisch" ausgedacht, der die Prozesse zur Entwicklung vertikaler und horizontaler Visiere so weit wie möglich automatisiert.

Die Briten mussten die Peilung nehmen und die Entfernung zum Ziel manuell bestimmen, aber Kurs und Geschwindigkeit des feindlichen Schiffes wurden automatisch vom Dumaresque-Gerät berechnet. Soweit ich verstanden habe, wurden die Ergebnisse dieser Berechnungen wiederum automatisch an den „Dreyer-Tisch“ übertragen, der Daten über seinen eigenen Kurs / seine eigene Geschwindigkeit von einem analogen Tachometer und Kreiselkompass erhielt und ein Modell der Schiffsbewegung erstellte. berechnet VIR und VIP. In unserem Land erfolgte auch nach dem Erscheinen des Pollan-Geräts, das die VIR berechnete, die Übertragung der VIR an die Maschine zur Berechnung der Visierhöhe wie folgt: Der Bediener las die Messwerte von Pollan und gab sie dann in die Maschine ein zur Berechnung der Visierhöhe. Bei den Briten geschah alles automatisch.
Ich habe versucht, die Daten auf dem LMS in eine einzige Tabelle zu bringen, das ist passiert:

Ach für mich - wahrscheinlich sündigt die Tabelle mit vielen Fehlern, die Daten auf dem deutschen LMS sind extrem lapidar: http://navycollection.narod.ru/library/Haase/artillery.htm
Und auf Englisch - auf Englisch, das ich nicht kenne: http://www.dreadnoughtproject.org/tfs/index.php/Dreyer_Fire_Control_Table
Wie die Briten das Problem mit der Kompensation von Längs- / Querrollen gelöst haben, weiß ich nicht. Aber die Deutschen hatten keine Ausgleichsgeräte (sie erschienen erst nach Jütland).
Im Allgemeinen stellt sich heraus, dass die SLA der baltischen Dreadnoughts den Briten immer noch unterlegen war und ungefähr auf dem gleichen Niveau wie die Deutschen lag. Stimmt, mit einer Ausnahme.
Auf dem deutschen "Derflinger" befanden sich 7 (in Worten - SIEBEN) Entfernungsmesser. Und sie alle maßen die Entfernung zum Feind, und der Durchschnittswert kam in die Maschine, um das Visier zu berechnen. Im Inland "Sewastopol" gab es zunächst nur zwei Entfernungsmesser (es gab auch die sogenannten Krylov-Entfernungsmesser, aber sie waren nichts anderes als verbesserte Lujol-Myakishev-Mikrometer und lieferten keine qualitativ hochwertigen Messungen auf große Entfernungen).
Einerseits scheint es, dass solche Entfernungsmesser (von viel besserer Qualität als die der Briten) den Deutschen nur eine schnelle Sichtung in Jütland ermöglichten, aber ist das so? Derselbe "Derflinger" schoss erst ab der 6. Salve und selbst dann im Allgemeinen zufällig (theoretisch sollte die sechste Salve einen Flug geben, der Anführer der "Derflinger" Hase versuchte, die Briten in die zu bringen Gabel, aber zu seiner Überraschung gab es eine Abdeckung ). "Goeben" im Allgemeinen zeigte auch keine glänzenden Ergebnisse. Es muss jedoch berücksichtigt werden, dass die Deutschen dennoch viel besser geschossen haben als die Briten, wahrscheinlich liegt darin ein Verdienst der deutschen Entfernungsmesser.
Aber ich glaube, dass die beste Genauigkeit der deutschen Schiffe keineswegs das Ergebnis einer Überlegenheit gegenüber den Briten im materiellen Teil ist, sondern ein völlig anderes System zur Ausbildung von Kanonieren.
Hier erlaube ich mir, einige Auszüge aus dem Buch zu machen Hector Charles Bywater und Hubert Cecil Ferraby Seltsame Intelligenz. Memoiren des Marinegeheimdienstes. Constable, London, 1931: http://militera.lib.ru/h/bywater_ferraby/index.html
Beeinflusst von Admiral Thomsen German Marine begann 1895 mit dem Langstreckenschießen zu experimentieren... ...die neu geschaffene Marine kann es sich leisten, weniger konservativ zu sein als Marinen mit alten Traditionen. Und deshalb wurde in Deutschland allen Innovationen, die die Kampfkraft der Flotte verbessern konnten, im Voraus eine offizielle Genehmigung garantiert ....
Nachdem die Deutschen dafür gesorgt hatten, dass das Schießen auf große Entfernungen in der Praxis möglich war, gaben sie ihren Seitengeschützen sofort den größtmöglichen Zielwinkel ...
... Wenn die Geschütztürme der Deutschen bereits 1900 den Kanonen erlaubten, ihre Läufe um 30 Grad anzuheben, überschritt der Elevationswinkel auf den britischen Schiffen 13,5 Grad nicht, was den deutschen Schiffen erhebliche Vorteile verschaffte. Wäre damals der Krieg ausgebrochen, hätte uns die deutsche Flotte an Treffsicherheit und Feuerreichweite weit, ja sogar entscheidend übertroffen ....
... Das zentralisierte Feuerleitsystem "Fire-Director", das, wie bereits erwähnt, auf den Schiffen der britischen Flotte installiert war, hatten die Deutschen einige Zeit nach der Schlacht um Jütland nicht, aber die Wirksamkeit ihres Feuers wurde bestätigt durch die Ergebnisse dieser Schlacht.
Natürlich waren diese Ergebnisse das Ergebnis von zwanzig Jahren intensiver Arbeit, beharrlich und akribisch, was im Allgemeinen für die Deutschen charakteristisch ist. Von 100 Pfund, die wir in jenen Jahren für Forschungen auf dem Gebiet der Artillerie bereitgestellt haben, hat Deutschland 1000 bereitgestellt. Nehmen wir nur ein Beispiel. Geheimdienstagenten erfuhren 1910, dass die Deutschen viel mehr Granaten für Übungen zuteilen als wir für großkalibrige Geschütze – 80 Prozent mehr Schüsse. Live-Schussübungen gegen gepanzerte Zielschiffe waren bei den Deutschen eine ständige Praxis, während sie bei der britischen Marine sehr selten oder gar nicht durchgeführt wurden ....
... 1910 wurden wichtige Übungen in der Ostsee mit dem Richtungsweiser-Gerät durchgeführt, das an Bord der Nassau- und Westfalen-Schiffe installiert war. Ein hoher Prozentsatz an Treffern auf sich bewegende Ziele aus Entfernungen von bis zu 11.000 Metern wurde demonstriert, und nach bestimmten Verbesserungen wurden neue praktische Tests organisiert.
Aber im März 1911 wurden genaue und viele erklärende Informationen erhalten. Es handelte sich um die Ergebnisse von Schießübungen, die von einer mit 280-mm-Geschützen ausgerüsteten Division deutscher Kriegsschiffe auf ein Schleppziel in einer Entfernung von durchschnittlich 11.500 Metern bei ziemlich schwerer See und mäßiger Sicht durchgeführt wurden. 8 Prozent der Granaten trafen das Ziel. Dieses Ergebnis war weit besser als alles, was uns vorher gesagt worden war. Daher zeigten sich die Experten skeptisch, aber die Beweise waren ziemlich zuverlässig.
Es war ganz klar, dass die Kampagne durchgeführt wurde, um die Vorzüge von Zielkennzeichnungs- und Leitsystemen zu testen und zu vergleichen. Einer von ihnen befand sich bereits auf dem Schlachtschiff Alsace, und der andere experimentelle wurde auf dem Blucher installiert. Der Schießplatz lag 30 Meilen südwestlich der Färöer-Inseln, das Ziel war ein leichter Kreuzer, der Teil der Division war. Es ist klar, dass sie nicht auf den Kreuzer selbst geschossen haben. Er war, wie sie in der britischen Marine sagen, ein „verschobenes Ziel“, dh das Zielen wurde auf das Zielschiff durchgeführt, während die Kanonen selbst in einen bestimmten Winkel verschoben und abgefeuert wurden. Die Überprüfung ist sehr einfach: Wenn die Instrumente korrekt funktionieren, fallen die Granaten genau in der berechneten Entfernung vom Heck des Zielschiffs.
Der Hauptvorteil dieser von den Deutschen erfundenen Methode besteht nach eigenen Angaben darin, dass sie ohne Beeinträchtigung der Genauigkeit der erzielten Ergebnisse es ermöglicht, herkömmliche Ziele beim Schießen zu ersetzen, die aufgrund schwerer Motoren und Mechanismen, kann nur mit niedriger Geschwindigkeit und normalerweise bei gutem Wetter abgeschleppt werden.
Die "Shift"-Schätzung kann nur bis zu einem gewissen Grad als ungefähr bezeichnet werden, da ihr die endgültige Tatsache fehlt - Löcher im Ziel, aber andererseits und die daraus gewonnenen Daten sind für alle praktischen Zwecke genau genug.
Während des ersten Experiments feuerten Alsace und Blucher aus einer Entfernung von 10.000 Metern auf ein Ziel, das durch einen leichten Kreuzer mit einer Geschwindigkeit von 14 bis 20 Knoten dargestellt wurde.
Diese Bedingungen waren für die damalige Zeit ungewöhnlich hart, und es ist nicht verwunderlich, dass der Bericht über die Ergebnisse dieser Schießereien Kontroversen auslöste und sogar seine Richtigkeit von einigen britischen Experten widerlegt wurde Marineartillerie. Diese Berichte waren jedoch wahr, und die Testergebnisse waren in der Tat unglaublich erfolgreich.
Aus 10.000 Metern feuerte das mit alten 280-mm-Kanonen bewaffnete Elsass eine Drei-Kanonen-Salve hinter dem Ziel ab, dh wenn die Kanonen nicht „mit einer Verschiebung“ gerichtet waren, würden die Granaten direkt auf das Ziel treffen. Dasselbe schaffte das Schlachtschiff problemlos, wenn es aus einer Entfernung von 12.000 Metern feuerte.
"Blücher" war mit 12 neuen 210-mm-Kanonen bewaffnet. Er schaffte es auch leicht, das Ziel zu treffen, die meisten Granaten trafen in unmittelbarer Nähe oder direkt in das Kielwasser des Zielkreuzers.
Am zweiten Tag wurde die Distanz auf 13.000 Meter erhöht. Das Wetter war schön, und ein kleiner Wellengang erschütterte die Schiffe. Trotz der erhöhten Distanz schoss "Alsace" gut, dass er vor "Blucher" alle Erwartungen übertraf.
Mit einer Geschwindigkeit von 21 Knoten "gabelte" der Panzerkreuzer das Zielschiff, das mit 18 Knoten fuhr, ab der dritten Salve. Darüber hinaus konnte man nach Schätzungen von Experten, die sich auf dem Zielkreuzer befanden, bei jeder der elf folgenden Salven den Treffer einer oder mehrerer Granaten mit Sicherheit feststellen. Angesichts des relativ kleinen Kalibers der Kanonen, der hohen Geschwindigkeit, mit der sowohl der „Schütze“ als auch das Ziel und der Zustand des Meeres waren, konnte das Ergebnis des damaligen Schießens als phänomenal bezeichnet werden. All diese Details und noch viel mehr waren in einem Bericht enthalten, den unser Agent an den Secret Service geschickt hatte.
Als der Bericht die Admiralität erreichte, hielten ihn einige alte Offiziere für falsch oder falsch. Der Agent, der den Bericht verfasste, wurde nach London gerufen, um die Angelegenheit zu besprechen. Ihm wurde gesagt, dass die von ihm in dem Bericht angegebenen Informationen zu den Testergebnissen „absolut unmöglich“ seien, dass kein einziges Schiff in der Lage sein würde, ein sich bewegendes Ziel in einer Entfernung von mehr als 11.000 Metern im Allgemeinen zu treffen. dass dies alles Fiktion oder ein Fehler war.
Ganz zufällig wurden diese Ergebnisse der deutschen Schießerei einige Wochen vor dem ersten Test des Feuerleitsystems von Admiral Scott mit dem Spitznamen "Fire-Director" durch die britische Marine bekannt. Die HMS Neptune war das erste Schiff, auf dem dieses System installiert wurde. Er führte im März 1911 ein Schießtraining mit hervorragenden Ergebnissen durch. Aber der offizielle Konservatismus verlangsamte die Einführung des Geräts auf anderen Schiffen. Diese Position dauerte bis November 1912, als Vergleichstests des auf dem Thunderer-Schiff installierten Director-Systems und des auf der Orion installierten alten Systems durchgeführt wurden.
Sir Percy Scott beschrieb die Lehren mit den folgenden Worten:
„Die Entfernung betrug 8200 Meter, die „Shooter“ -Schiffe bewegten sich mit einer Geschwindigkeit von 12 Knoten, die Ziele wurden mit der gleichen Geschwindigkeit geschleppt. Beide Schiffe eröffneten unmittelbar nach dem Signal gleichzeitig das Feuer. Der Thunderer hat sehr gut geschossen. Orion schickte seine Granaten in alle Richtungen. Drei Minuten später wurde das Signal „Feuer einstellen!“ gegeben und das Ziel überprüft. Als Ergebnis stellte sich heraus, dass der Thunderer sechs Treffer mehr erzielte als der Orion.
Das erste scharfe Feuer in der britischen Marine auf eine Entfernung von 13.000 Metern fand unseres Wissens im Jahr 1913 statt, als das Schiff „Neptune“ aus einer solchen Entfernung auf ein Ziel feuerte.
Wer die Entwicklung der Werkzeuge und Techniken des Artilleriefeuers in Deutschland verfolgte, wusste, was uns erwartete. Und wenn sich etwas als Überraschung herausstellte, dann nur die Tatsache, dass in der Schlacht um Jütland das Verhältnis der Anzahl der Granaten, die das Ziel trafen, zu Gesamtzahl abgefeuerte Granaten überstiegen 3,5% nicht.
Ich erlaube mir zu behaupten, dass die Qualität des deutschen Schießens im Artillerie-Ausbildungssystem lag, das viel besser war als das der Briten. Infolgedessen kompensierten die Deutschen eine gewisse Überlegenheit der Briten in der LMS mit Professionalität.
BUNDESAGENTUR FÜR BILDUNG
Staatliche Bildungseinrichtung der Höheren Berufsbildung
MOSKAUER STAATLICHES INSTITUT FÜR FUNKTECHNIK, ELEKTRONIK UND AUTOMATISIERUNG (TECHNISCHE UNIVERSITÄT)
KURSARBEIT
nach Disziplin
"Physikalische Grundlagen der Messung"
Thema: Entfernungsmesser
№ Künstler der Studentengruppe - ES-2-08
Nachname des I. O. des Darstellers - Prusakov A. A.
Nachname und Name des Kopfes - Rusanov K. E.
Moskau 2010
Einleitung ____________________________________________________________3
2. Arten von Entfernungsmessern _____________________________________________5
3. Laser-Entfernungsmesser _____________________________________________6
3.1. Physikalische Messgrundlagen und Wirkungsweise _________________8
3.2 Konstruktionsmerkmale und Funktionsprinzip. Typen und Anwendung ____12
4. Optischer Entfernungsmesser __________________________________________19
4.1. Physikalische Messgrundlagen und Wirkungsweise ________________21
4.1.2 Gewindeabstandsmesser mit festem Winkel ____________________________23
4.1.3 Messung der Schrägdistanz mit einem Filamentdistanzmesser __________25
4.2 Konstruktionsmerkmale und Wirkungsweise ________________________________27
5. Fazit ____________________________________________________________29
6. Bibliografisches Verzeichnis ______________________________________30
1. Einleitung
Entfernungsmesser- ein Gerät zur Bestimmung der Entfernung vom Beobachter zum Objekt. Verwendet in der Geodäsie, zum Fokussieren in der Fotografie, in Zielen von Waffen, Bombensystemen usw.
Geodäsie- Produktionszweig im Zusammenhang mit Bodenmessungen. Es ist ein wesentlicher Bestandteil der Bauarbeiten. Mit Hilfe der Geodäsie werden Projekte von Gebäuden und Bauwerken millimetergenau vom Papier in die Natur übertragen, Materialmengen berechnet und die Einhaltung der geometrischen Parameter von Bauwerken überwacht. Es findet auch Anwendung im Bergbau zur Berechnung von Spreng- und Gesteinsvolumina.
Die Hauptaufgaben der Geodäsie:
Unter den vielen Aufgaben der Geodäsie lassen sich „Langzeitaufgaben“ und „Aufgaben für die kommenden Jahre“ herausgreifen.
Langfristige Aufgaben umfassen:
Bestimmung von Figur, Größe und Gravitationsfeld der Erde;
Verteilung eines einzigen Koordinatensystems auf das Territorium eines separaten Staates, Kontinents und der gesamten Erde als Ganzes;
Durchführung von Messungen auf der Erdoberfläche;
Darstellung von Landflächen auf topografischen Karten und Plänen;
Untersuchung der globalen Verschiebungen der Erdkrustenblöcke.
Derzeit lauten die Hauptaufgaben für die kommenden Jahre in Russland wie folgt:
Erstellung staatlicher und lokaler Kataster: Grundstücke, Wasserwald, Stadtkataster usw.;
topographische und geodätische Unterstützung für die Abgrenzung (Definition) und Markierung (Ausweisung) der Staatsgrenze Russlands;
Entwicklung und Implementierung von Standards im Bereich der digitalen Kartierung;
Erstellung von digitalen und elektronischen Karten und deren Datenbanken;
Entwicklung eines Konzepts und eines Landesprogramms zur flächendeckenden Umstellung auf Satellitenverfahren zur autonomen Koordinatenbestimmung;
Erstellung eines umfassenden nationalen Atlas von Russland und anderen.
Laser Ranging ist einer der ersten Bereiche der praktischen Anwendung von Lasern in ausländischer militärischer Ausrüstung. Die ersten Experimente stammen aus dem Jahr 1961, und jetzt werden Laser-Entfernungsmesser sowohl in militärischer Bodenausrüstung (Artillerie usw.) als auch in der Luftfahrt (Entfernungsmesser, Höhenmesser, Zielkennzeichnung) und in der Marine eingesetzt. Diese Technik hat sich bewährt Kampfversuche in Vietnam und im Nahen Osten. Derzeit wurde eine Reihe von Entfernungsmessern von vielen Armeen der Welt übernommen.
Reis. 2 - Laservisier-Entfernungsmesser. Zuerst verwendet auf T72A
2. Arten von Entfernungsmessern
Entfernungsmessergeräte werden in aktive und passive unterteilt:
Sound-Entfernungsmesser
leichter Entfernungsmesser
Laser-Entfernungsmesser
Entfernungsmesser mit einer optischen Parallaxe-Entfernungsmesserkamera)
Entfernungsmesser, die den Objekt-zu-Muster-Abgleich verwenden
aktiv:
passiv:
Das Funktionsprinzip aktiver Entfernungsmesser besteht darin, die Zeit zu messen, die das vom Entfernungsmesser gesendete Signal benötigt, um die Entfernung zum Objekt und zurück zurückzulegen. Die Geschwindigkeit der Signalausbreitung (Licht- oder Schallgeschwindigkeit) wird als bekannt vorausgesetzt.
Die Entfernungsmessung mit passiven Entfernungsmessern basiert auf der Bestimmung der Höhe h beispielsweise eines gleichschenkligen Dreiecks ABC mit der bekannten Seite AB = l (Basis) und dem gegenüberliegenden spitzen Winkel b (dem sogenannten Parallaxenwinkel). Für kleine Winkel b (ausgedrückt im Bogenmaß)
Eine der Größen, l oder b, ist normalerweise konstant, und die andere ist variabel (gemessen). Auf dieser Grundlage werden Entfernungsmesser unterschieden konstanter Winkel und Entfernungsmesser mit festem Sockel.
3. Laser-Entfernungsmesser
Laser-Entfernungsmesser - ein Gerät zum Messen von Entfernungen mit einem Laserstrahl.
Es wird häufig in der Ingenieurgeodäsie, der topografischen Vermessung, der militärischen Navigation, der gastronomischen Forschung und der Fotografie eingesetzt.
Ein Laser-Entfernungsmesser ist ein Gerät, das aus einem gepulsten Laserstrahlungsdetektor besteht. Indem die Zeit gemessen wird, die der Strahl zum Reflektor und zurück benötigt, und der Wert der Lichtgeschwindigkeit bekannt ist, ist es möglich, die Entfernung zwischen dem Laser und dem reflektierenden Objekt zu berechnen.

Abb.1 Moderne Modelle von Laser-Entfernungsmessern.
elektromagnetische Strahlung, die sich mit konstanter Geschwindigkeit ausbreitet, ermöglicht die Bestimmung der Entfernung zum Objekt. Bei der Impulsentfernungsmethode wird also das folgende Verhältnis verwendet:
wo L- der Abstand zum Objekt, die Lichtgeschwindigkeit im Vakuum, der Brechungsindex des Mediums, in dem sich die Strahlung ausbreitet, t ist die Zeit, die der Impuls benötigt, um das Ziel und zurück zu erreichen.
Die Betrachtung dieses Zusammenhangs zeigt, dass die potentielle Genauigkeit der Entfernungsmessung durch die Genauigkeit der Messung der Zeit des Durchgangs des Energieimpulses zum Objekt und zurück bestimmt wird. Es ist klar, je kürzer der Puls, desto besser.
3.1. Physikalische Messgrundlagen und Wirkungsweise
Die Aufgabe, die Entfernung zwischen dem Entfernungsmesser und dem Ziel zu bestimmen, reduziert sich auf die Messung des entsprechenden Zeitintervalls zwischen dem Sondierungssignal und dem Signal, der Reflexion vom Ziel. Es gibt drei Methoden zur Entfernungsmessung, je nachdem, welche Art der Modulation der Laserstrahlung im Entfernungsmesser verwendet wird: Puls, Phase oder Phase-Puls. Das Wesen der Impulsentfernungsmethode besteht darin, dass ein Sondierungsimpuls an das Objekt gesendet wird, der auch einen Zeitzähler im Entfernungsmesser startet. Wenn der vom Objekt reflektierte Impuls den Entfernungsmesser erreicht, stoppt er den Zähler. Je nach Zeitintervall wird die Entfernung zum Objekt automatisch vor dem Bediener angezeigt. Schätzen wir die Genauigkeit eines solchen Ranging-Verfahrens ab, wenn bekannt ist, dass die Genauigkeit der Messung des Zeitintervalls zwischen dem Sondierungs- und dem reflektierten Signal 10 V –9 s entspricht. Da wir davon ausgehen können, dass die Lichtgeschwindigkeit 3 * 10 cm / s beträgt, erhalten wir einen Fehler bei der Änderung des Abstands von etwa 30 cm. Experten glauben, dass dies völlig ausreicht, um eine Reihe praktischer Probleme zu lösen.
Beim Phase-Ranging-Verfahren wird Laserstrahlung nach einem Sinusgesetz moduliert. Dabei variiert die Strahlungsintensität in einem signifikanten Bereich. Je nach Abstand zum Objekt ändert sich die Phase des auf das Objekt gefallenen Signals. Das vom Objekt reflektierte Signal kommt je nach Entfernung auch mit einer bestimmten Phase am Empfangsgerät an. Schätzen wir den Fehler eines für den Feldbetrieb geeigneten Phasenentfernungsmessers ab. Experten sagen, dass es für den Bediener nicht schwierig ist, die Phase mit einem Fehler von nicht mehr als einem Grad zu bestimmen. Wenn die Modulationsfrequenz der Laserstrahlung 10 MHz beträgt, beträgt der Entfernungsmessfehler etwa 5 cm.
Entfernungsmesser werden nach dem Funktionsprinzip in zwei Hauptgruppen unterteilt, geometrische und physikalische Typen.

Abb.2 Das Funktionsprinzip des Entfernungsmessers
Die erste Gruppe besteht aus geometrischen Entfernungsmessern. Die Messung von Entfernungen mit einem solchen Entfernungsmesser basiert auf der Bestimmung der Höhe h beispielsweise eines gleichschenkligen Dreiecks ABC (Fig. 3) mit der bekannten Seite AB = I (Basis) und dem gegenüberliegenden spitzen Winkel. Eine der Größen, I, ist normalerweise eine Konstante und die andere eine Variable (gemessen). Auf dieser Grundlage werden Entfernungsmesser mit konstantem Winkel und Entfernungsmesser mit konstanter Basis unterschieden. Ein Festwinkel-Entfernungsmesser ist ein Teleskop mit zwei parallelen Filamenten im Gesichtsfeld und einer tragbaren Schiene mit äquidistanten Teilungen als Basis. Die vom Entfernungsmesser gemessene Entfernung zur Basis ist proportional zur Anzahl der durch das Teleskop zwischen den Fäden sichtbaren Teilungen des Stabes. Viele geodätische Instrumente (Theodolite, Nivelliergeräte etc.) arbeiten nach diesem Prinzip. Der relative Fehler des Filament-Entfernungsmessers beträgt 0,3-1%. Komplexere optische Entfernungsmesser mit fester Basis basieren auf dem Prinzip der Überlagerung von Bildern eines Objekts, die aus Strahlen aufgebaut sind, die verschiedene optische Systeme des Entfernungsmessers durchlaufen haben. Die Ausrichtung erfolgt mit einem optischen Kompensator, der sich in einem der optischen Systeme befindet, und das Messergebnis wird auf einer speziellen Skala abgelesen. Als fotografische Entfernungsmesser sind monokulare Entfernungsmesser mit einer Basis von 3-10 cm weit verbreitet. Der Fehler optischer Entfernungsmesser mit konstanter Basis beträgt weniger als 0,1 % der gemessenen Entfernung.
Das Funktionsprinzip eines physikalischen Entfernungsmessers besteht darin, die Zeit zu messen, die das vom Entfernungsmesser gesendete Signal benötigt, um die Entfernung zu einem Objekt und zurück zurückzulegen. Die Fähigkeit elektromagnetischer Strahlung, sich mit konstanter Geschwindigkeit auszubreiten, ermöglicht es, die Entfernung zu einem Objekt zu bestimmen. Unterscheiden Sie Puls- und Phasenmethoden der Entfernungsmessung.
Bei der Impulsmethode wird ein Antastimpuls an das Objekt gesendet, der einen Zeitzähler im Entfernungsmesser startet. Wenn der vom Objekt reflektierte Impuls zum Entfernungsmesser zurückkehrt, stoppt er den Zähler. Durch das Zeitintervall (Verzögerung des reflektierten Impulses) wird mithilfe des eingebauten Mikroprozessors die Entfernung zum Objekt bestimmt:
wobei: L der Abstand zum Objekt ist, c die Ausbreitungsgeschwindigkeit der Strahlung ist, t die Zeit ist, die der Puls benötigt, um das Ziel und zurück zu erreichen.
Reis. 3 - Das Funktionsprinzip des Entfernungsmessers vom geometrischen Typ
AB - Basis, h - gemessener Abstand
Bei der Phasenmethode wird die Strahlung mit einem Modulator (einem elektrooptischen Kristall, der unter dem Einfluss eines elektrischen Signals seine Parameter ändert) nach einem Sinusgesetz moduliert. Die reflektierte Strahlung tritt in den Photodetektor ein, wo das Modulationssignal extrahiert wird. Je nach Abstand zum Objekt ändert sich die Phase des reflektierten Signals relativ zur Phase des Signals im Modulator. Durch Messung der Phasendifferenz wird die Entfernung zum Objekt gemessen.
3.2 Konstruktionsmerkmale und Funktionsprinzip. Typen und Anwendung
Der erste Laser-Entfernungsmesser XM-23 wurde von den Armeen getestet und übernommen. Es ist für den Einsatz in fortgeschrittenen Beobachtungsposten der Bodentruppen konzipiert. Die darin enthaltene Strahlungsquelle ist ein Rubinlaser mit einer Ausgangsleistung von 2,5 W und einer Pulsdauer von 30 ns. Integrierte Schaltungen werden in großem Umfang beim Entwurf des Entfernungsmessers verwendet. Sender, Empfänger und optische Elemente sind in einem Monoblock montiert, der über Skalen zur genauen Anzeige des Azimut- und Höhenwinkels des Ziels verfügt. Der Entfernungsmesser wird von einem 24-V-Nickel-Cadmium-Akku gespeist, der 100 Entfernungsmessungen ohne Aufladen ermöglicht. Auf eine andere Artillerie-Entfernungsmesser, ebenfalls von den Armeen übernommen, gibt es ein Gerät zur gleichzeitigen Bestimmung der Entfernung von bis zu vier Zielen, die auf derselben geraden Linie liegen, indem nacheinander Entfernungen von 200, 600, 1000, 2000 und 3000 m abgetastet werden.
Interessanter schwedischer Laser-Entfernungsmesser. Es ist für den Einsatz in Feuerleitsystemen der Marine- und Küstenartillerie an Bord vorgesehen. Das Design des Entfernungsmessers ist besonders langlebig, was den Einsatz unter schwierigen Bedingungen ermöglicht. Der Entfernungsmesser kann bei Bedarf mit einem Bildverstärker oder einem Fernsehvisier gekoppelt werden. Der Betriebsmodus des Entfernungsmessers sieht beide Messungen alle 2s vor. innerhalb von 20s. und mit einer Pause zwischen einer Messreihe für 20 s. oder alle 4s. Für eine lange Zeit. Digitale Entfernungsmesser arbeiten so, dass, wenn einer der Anzeiger die zuletzt gemessene Entfernung anzeigt, die anderen vier vorherigen Entfernungsmessungen im Speicher des anderen gespeichert werden.
Ein sehr erfolgreicher Laser-Entfernungsmesser ist der LP-4. Es hat einen optisch-mechanischen Verschluss als Q-Schalter. Der Empfangsteil des Entfernungsmessers ist auch das Sichtfeld des Bedieners. Der Durchmesser des optischen Eingangssystems beträgt 70 mm. Der Empfänger ist eine tragbare Fotodiode, deren Empfindlichkeit einen Maximalwert bei einer Wellenlänge von 1,06 μm hat. Das Messgerät ist mit einem Bereichs-Strobing-Schaltkreis ausgestattet, der je nach Einstellung des Bedieners von 200 bis 3000 m arbeitet. Im Schema des optischen Visiers ist vor dem Okular ein Schutzfilter angeordnet, um das Auge des Bedieners vor den Auswirkungen seines Lasers zu schützen, wenn er den reflektierten Impuls empfängt. Sender und Empfänger sind in einem Gehäuse montiert. Der Höhenwinkel des Ziels wird innerhalb von + 25 Grad bestimmt. Der Akku liefert 150 Distanzmessungen ohne Nachladen, sein Gewicht beträgt nur 1 kg. Der Entfernungsmesser wurde in einer Reihe von Ländern getestet und gekauft, darunter - Kanada, Schweden, Dänemark, Italien, Australien. Darüber hinaus unterzeichnete das britische Verteidigungsministerium einen Vertrag über die Lieferung eines modifizierten LP-4-Entfernungsmessers mit einem Gewicht von 4,4 kg an die britische Armee.
Tragbare Laser-Entfernungsmesser sind für Infanterieeinheiten und vordere Artilleriebeobachter konzipiert. Einer dieser Entfernungsmesser ist in Form eines Fernglases hergestellt. Die Strahlungsquelle und der Empfänger sind in einem gemeinsamen Gehäuse montiert, mit einem monokularen optischen Visier mit sechsfacher Vergrößerung, in dessen Sichtfeld sich eine Leuchtplatte aus LEDs befindet, die sowohl nachts als auch tagsüber deutlich unterscheidbar sind . Der Laser verwendet als Strahlungsquelle einen Yttrium-Aluminium-Granat, mit einem Q-Schalter auf Lithiumniobat. Diese liefert eine Spitzenleistung von 1,5 MW. Der Empfangsteil verwendet einen Dual-Avalanche-Fotodetektor mit einem rauscharmen Breitbandverstärker, der es ermöglicht, kurze Impulse mit einer geringen Leistung von nur 10 V - 9 W zu erkennen. Falsche Signale, die von nahegelegenen Objekten reflektiert werden, die sich im Lauf mit dem Ziel befinden, werden mithilfe einer Entfernungs-Gate-Schaltung eliminiert. Die Stromquelle ist ein kleiner Akku, der 250 Messungen ohne Aufladen ermöglicht. Die elektronischen Einheiten des Entfernungsmessers bestehen aus integrierten und hybriden Schaltungen, wodurch die Masse des Entfernungsmessers zusammen mit der Stromquelle auf 2 kg erhöht werden konnte.
Die Installation von Laser-Entfernungsmessern an Panzern interessierte sofort ausländische Entwickler von Militärwaffen. Dies liegt daran, dass es bei einem Panzer möglich ist, einen Entfernungsmesser in das Feuerleitsystem des Panzers einzuführen, wodurch seine Kampfqualitäten erhöht werden. Zu diesem Zweck wurde der AN / VVS-1-Entfernungsmesser für den M60A-Panzer entwickelt. Es unterschied sich jedoch im Design nicht von einem Laserartillerie-Entfernungsmesser auf einem Rubin und gab außerdem Entfernungsdaten auf einer Digitalanzeige im Rechner des Feuerleitsystems des Panzers aus. In diesem Fall kann die Entfernungsmessung sowohl vom Richtschützen als auch vom Panzerkommandanten durchgeführt werden. Entfernungsmesser-Betriebsmodus - 15 Messungen pro Minute für eine Stunde. Die ausländische Presse berichtet, dass ein fortschrittlicherer Entfernungsmesser, der später entwickelt wurde, Reichweitengrenzen von 200 bis 4700 m hat. mit einer Genauigkeit von + 10 m und einem Computer, der mit dem Feuerleitsystem des Panzers verbunden ist, wo zusammen mit anderen Daten 9 weitere Arten von Munitionsdaten verarbeitet werden. Dadurch ist es laut den Entwicklern möglich, das Ziel mit dem ersten Schuss zu treffen. Das Feuerleitsystem einer Panzerkanone hat ein zuvor betrachtetes Analogon als Entfernungsmesser, enthält jedoch sieben weitere sensorische Sensoren und ein optisches Visier. Der Name der Kobeld-Installation. Die Presse berichtet, dass es eine hohe Wahrscheinlichkeit bietet, das Ziel zu treffen, und trotz der Komplexität dieser Installation wechselt der Ballistikmechanismus in die Position, die der ausgewählten Schussart entspricht, und drückt dann die Laser-Entfernungsmessertaste. Beim Schießen auf ein sich bewegendes Ziel senkt der Schütze zusätzlich den Feuerleitschalter, so dass das Signal vom Turmdrehgeschwindigkeitssensor beim Verfolgen des Ziels hinter dem Drehzahlmesser zum Rechengerät geht und dabei hilft, ein Signal von der Einrichtung zu erzeugen. Mit dem Laser-Entfernungsmesser, der Teil des Kobeld-Systems ist, können Sie die Entfernung gleichzeitig zu zwei Zielen messen, die sich in der Ausrichtung befinden. Das System reagiert schnell, sodass Sie in kürzester Zeit schießen können.
Eine Analyse der Diagramme zeigt, dass die Verwendung eines Systems mit einem Laser-Entfernungsmesser und einem Computer eine Wahrscheinlichkeit bietet, ein Ziel zu treffen, das der berechneten nahe kommt. Die Grafiken zeigen auch, wie viel wahrscheinlicher es ist, ein sich bewegendes Ziel zu treffen. Wenn bei stationären Zielen die Trefferwahrscheinlichkeit bei der Verwendung eines Lasersystems im Vergleich zur Trefferwahrscheinlichkeit bei der Verwendung eines Systems mit einem Stereo-Entfernungsmesser auf eine Entfernung von etwa 1000 m keinen großen Unterschied macht und erst auf eine Entfernung von 1500 m spürbar ist oder mehr, dann ist der Gewinn für sich bewegende Ziele klar. Es ist ersichtlich, dass die Wahrscheinlichkeit, ein sich bewegendes Ziel zu treffen, bei Verwendung eines Lasersystems, verglichen mit der Wahrscheinlichkeit, bei Verwendung eines Systems mit einem Stereo-Entfernungsmesser bereits in einer Entfernung von 100 m um mehr als das 3,5-fache zuzunehmen, und bei Bei einer Entfernung von 2000 m, wo das System mit einem Stereo-Entfernungsmesser praktisch wirkungslos wird, bietet das Lasersystem eine Niederlagenwahrscheinlichkeit ab dem ersten Schuss von etwa 0,3.
In Armeen, neben Artillerie und Panzern, werden Laser-Entfernungsmesser in Systemen eingesetzt, in denen es erforderlich ist, die Entfernung mit hoher Genauigkeit in kurzer Zeit zu bestimmen. So wurde in der Presse berichtet, dass ein automatisches System zur Verfolgung von Luftzielen und zur Messung der Entfernung zu ihnen entwickelt wurde. Das System ermöglicht eine genaue Messung von Azimut, Elevation und Entfernung. Daten können auf Magnetband aufgezeichnet und auf einem Computer verarbeitet werden. Das System hat eine geringe Größe und ein geringes Gewicht und wird auf einem mobilen Lieferwagen platziert. Das System umfasst einen Laser, der im Infrarotbereich arbeitet. Infrarot-TV-Kameraempfänger, TV-Monitor, Servo-Draht-Tracking-Spiegel, digitale Anzeige und Rekorder. Das Neodym-Glaslasergerät arbeitet im gütegeschalteten Modus und emittiert Energie bei einer Wellenlänge von 1,06 µm. Die Strahlungsleistung beträgt 1 MW pro Puls mit einer Dauer von 25 ns und einer Pulswiederholrate von 100 Hz. Die Divergenz des Laserstrahls beträgt 10 mrad. Verfolgungskanäle verwenden verschiedene Arten von Fotodetektoren. Der Empfänger verwendet eine Silizium-LED. Im Verfolgungskanal - ein aus vier Fotodioden bestehendes Gitter, mit dessen Hilfe ein Fehlanpassungssignal erzeugt wird, wenn das Ziel in Azimut und Elevation von der Sichtachse weg verschoben wird. Das Signal jedes Empfängers wird einem Videoverstärker mit logarithmischem Verhalten und einem Dynamikbereich von 60 dB zugeführt. Das minimale Schwellensignal, bei dem das System das Ziel überwacht, beträgt 5 * 10 V-8 W. Der Zielverfolgungsspiegel wird durch Servomotoren in Azimut und Elevation angetrieben. Mit dem Ortungssystem können Sie den Standort von Luftzielen in einer Entfernung von bis zu 19 km bestimmen. während die experimentell ermittelte Genauigkeit der Zielverfolgung 0,1 mrad beträgt. im Azimut und 0,2 mrad in der Höhe des Ziels. Entfernungsmessgenauigkeit + 15 cm.
Laser-Entfernungsmesser auf Rubin- und Neodym-Glas ermöglichen die Entfernungsmessung zu stationären oder sich langsam bewegenden Objekten, da die Impulswiederholungsrate gering ist. Nicht mehr als ein Hertz. Wenn kurze Entfernungen gemessen werden müssen, jedoch mit einer höheren Frequenz von Messzyklen, werden Phasenentfernungsmesser mit einem Halbleiterlaser-Emitter verwendet. In der Regel verwenden sie Galliumarsenid als Quelle. Hier ist eine Beschreibung eines der Entfernungsmesser: Ausgangsleistung 6,5 W pro Puls, dessen Dauer 0,2 μs beträgt, und die Pulswiederholrate 20 kHz beträgt. Die Laserstrahldivergenz beträgt 350*160 mrad, d.h. ähnelt einem Blütenblatt. Bei Bedarf kann die Winkeldivergenz des Strahls auf 2 mrad reduziert werden. Der Empfänger besteht aus einem optischen System, dessen Brennebene eine Blende ist, die das Sichtfeld des Empfängers auf die gewünschte Größe begrenzt. Die Kollimation wird durch eine kurze Fokuslinse durchgeführt, die sich hinter der Blende befindet. Die Arbeitswellenlänge beträgt 0,902 Mikrometer und der Bereich reicht von 0 bis 400 m. Die Presse berichtet, dass diese Eigenschaften in späteren Designs erheblich verbessert wurden. So wurde beispielsweise bereits ein Laser-Entfernungsmesser mit einer Reichweite von 1500 m entwickelt. und Entfernungsmessgenauigkeit + 30m. Dieser Entfernungsmesser hat eine Wiederholrate von 12,5 kHz bei einer Pulsdauer von 1 μs. Ein weiterer in den USA entwickelter Entfernungsmesser hat eine Reichweite von 30 bis 6400 m. Die Impulsleistung beträgt 100 W und die Impulswiederholungsrate 1000 Hz.
Da mehrere Arten von Entfernungsmessern verwendet werden, besteht die Tendenz, Lasersysteme in Form von separaten Modulen zu vereinheitlichen. Dies vereinfacht deren Montage sowie den Austausch einzelner Module im laufenden Betrieb. Laut Experten bietet der modulare Aufbau des Laser-Entfernungsmessers maximale Zuverlässigkeit und Wartbarkeit im Feld.
Das Emittermodul besteht aus einem Stab, einer Pumplampe, einem Illuminator, einem Hochspannungstransformator und Resonatorspiegeln. Qualitätsmodulator. Als Strahlungsquelle wird meist Neodym-Glas oder Aluminium-Natrium-Granat verwendet, was den Betrieb des Entfernungsmessers ohne Kühlsystem gewährleistet. Alle diese Elemente des Kopfes sind in einem starren zylindrischen Körper angeordnet. Die präzise Bearbeitung der Sitze an beiden Enden des zylindrischen Körpers des Kopfes ermöglicht einen schnellen Austausch und Einbau ohne zusätzliche Anpassung, was eine einfache Wartung und Reparatur gewährleistet. Für die anfängliche Einstellung des optischen Systems wird ein Referenzspiegel verwendet, der auf einer sorgfältig bearbeiteten Oberfläche des Kopfes senkrecht zur Achse des zylindrischen Körpers montiert ist. Eine Beleuchtung vom Diffusionstyp besteht aus zwei ineinander übergehenden Zylindern, zwischen deren Wänden sich eine Schicht aus Magnesiumoxid befindet. Der Q-Switch ist für stabilen Dauerbetrieb oder gepulsten Betrieb mit schnellen Starts ausgelegt. Die Hauptdaten des einheitlichen Kopfes sind wie folgt: Wellenlänge - 1,06 μm, Pumpenergie - 25 J, Ausgangsimpulsenergie - 0,2 J, Impulsdauer 25 ns, Impulswiederholungsrate 0,33 Hz für 12 s, Betrieb mit einer Frequenz von 1 Hz erlaubt ist), beträgt der Divergenzwinkel 2 mrad. Aufgrund der hohen Empfindlichkeit gegenüber Eigenrauschen sind Fotodiode, Vorverstärker und Netzteil in einem Gehäuse mit dem dichtesten Layout untergebracht, und bei einigen Modellen ist alles in einer einzigen kompakten Einheit ausgeführt. Dies liefert eine Empfindlichkeit in der Größenordnung von 5 * 10 in -8 Watt.
Der Verstärker verfügt über eine Schwellenschaltung, die in dem Moment aktiviert wird, in dem der Impuls die Hälfte der maximalen Amplitude erreicht, wodurch die Genauigkeit des Entfernungsmessers verbessert wird, da die Auswirkung von Schwankungen in der Amplitude des eingehenden Impulses verringert wird. Die Start- und Stoppsignale werden von demselben Photodetektor erzeugt und folgen demselben Weg, wodurch systematische Entfernungsfehler beseitigt werden. Das optische System besteht aus einem afokalen Teleskop zur Reduzierung der Divergenz des Laserstrahls und einer Fokussierlinse für den Fotodetektor. Photodioden haben einen Durchmesser der aktiven Fläche von 50, 100 und 200 µm. Eine deutliche Größenreduzierung wird durch die Tatsache ermöglicht, dass die Empfangs- und Sendeoptik kombiniert sind und der zentrale Teil zur Bildung der Strahlung des Senders und der periphere Teil zum Empfang des vom Ziel reflektierten Signals verwendet wird.
4. Optischer Entfernungsmesser
Optische Entfernungsmesser ist ein allgemeiner Name für eine Gruppe von Entfernungsmessern mit visueller Ausrichtung auf ein Objekt (Ziel), deren Betrieb auf der Verwendung der Gesetze der geometrischen (Strahlen-) Optik basiert. Optische Entfernungsmesser sind üblich: mit einem konstanten Winkel und einer entfernten Basis (z. B. ein Filament-Entfernungsmesser, der von vielen geodätischen Instrumenten geliefert wird - Theodoliten, Wasserwaagen usw.); mit einer konstanten internen Basis - monokular (z. B. ein fotografischer Entfernungsmesser) und binokular (stereoskopischer Entfernungsmesser).
Optischer Entfernungsmesser (Lichtentfernungsmesser) - ein Gerät zum Messen von Entfernungen anhand der Zeit, die optische Strahlung (Licht) benötigt, um die gemessene Entfernung zurückzulegen. Ein optischer Entfernungsmesser enthält eine Quelle optischer Strahlung, ein Gerät zur Steuerung seiner Parameter, ein Sende- und Empfangssystem, einen Fotodetektor und ein Gerät zur Messung von Zeitintervallen. Der optische Entfernungsmesser wird in Impuls und Phase unterteilt, abhängig von den Methoden zur Bestimmung der Zeit, die die Strahlung benötigt, um die Entfernung vom Objekt und zurück zurückzulegen.

Reis. 4 - Moderner optischer Entfernungsmesser

Abb. 5 - Optischer Entfernungsmesser Typ "Möwe"
Bei Entfernungsmessern wird nicht die Länge der Linie selbst gemessen, sondern ein anderer Wert, relativ zu dem die Länge der Linie eine Funktion ist.
Wie bereits erwähnt, werden in der Geodäsie 3 Arten von Entfernungsmessern verwendet:
optisch (Entfernungsmesser vom geometrischen Typ),
elektrooptisch (Lichtentfernungsmesser),
Funktechnik (Funkentfernungsmesser).
4.1. Physikalische Messgrundlagen und Wirkungsweise

Reis. 6 Geometrisches Schema optischer Entfernungsmesser
Es sei erforderlich, den Abstand AB zu finden. Wir platzieren einen optischen Entfernungsmesser am Punkt A und eine Schiene am Punkt B senkrecht zur Linie AB.
Bezeichnen: l - Segment der Schiene GM,
φ - der Winkel, in dem dieses Segment von Punkt A aus sichtbar ist.
Aus dem Dreieck AGB haben wir:
D=1/2*ctg(φ/2) (4.1.1)
D = l * сtg(φ) (4.1.2)
Normalerweise ist der Winkel φ klein (bis zu 1 o), und durch Anwendung der Entwicklung der Funktion Ctgφ in einer Reihe kann Formel (4.1.1) auf die Form (4.1.2) reduziert werden. Auf der rechten Seite dieser Formeln gibt es zwei Argumente, in Bezug auf die der Abstand D eine Funktion ist. Wenn eines der Argumente einen konstanten Wert hat, reicht es aus, nur einen Wert zu messen, um den Abstand D zu finden. Je nachdem welcher Wert - φ oder l - konstant genommen wird, gibt es Entfernungsmesser mit konstantem Winkel und Entfernungsmesser mit konstanter Basis.
Bei einem Entfernungsmesser mit konstantem Winkel wird das Segment l gemessen, und der Winkel φ ist konstant; er wird diastimometrischer Winkel genannt.
Bei Entfernungsmessern mit konstanter Basis wird der Winkel φ gemessen, der als parallaktischer Winkel bezeichnet wird; Das Segment l hat eine konstante bekannte Länge und wird als Basis bezeichnet.
4.1.2 Fadenabstandsmesser mit konstantem Winkel
Im Fadengitter von Teleskopen befinden sich in der Regel zwei zusätzliche horizontale Fäden, die sich auf beiden Seiten der Mitte des Fadengitters in gleichen Abständen davon befinden; dies sind Entfernungsmesserfäden (Abb. 7).
Zeichnen wir den Strahlengang durch die Entfernungsmesserfilamente in einem Kepler-Rohr mit externer Fokussierung. Das Gerät wird über Punkt A installiert; An Punkt B ist eine Schiene senkrecht zur Sichtlinie des Rohres installiert. Finden Sie den Abstand zwischen den Punkten A und B.

Reis. 7 - Entfernungsmessergewinde
Konstruieren wir den Strahlengang aus den Punkten m und g der Entfernungsmessfäden. Die Strahlen von den Punkten m und g, die parallel zur optischen Achse verlaufen, werden nach der Brechung an der Objektivlinse diese Achse am vorderen Brennpunkt F kreuzen und in die Punkte M und G der Schiene fallen. Die Entfernung von Punkt A nach Punkt B beträgt:
D = l/2 * Ctg(φ/2) + frev + d (4.1.2.1)
wobei d der Abstand vom Mittelpunkt der Linse zur Rotationsachse des Theodoliten ist;
f about - Brennweite des Objektivs;
l ist die Länge des Segments MG auf der Schiene.
Bezeichne (f ungefähr + d) bis c und den Wert 1/2*Ctg φ/2 - bis C, dann
D = C * l + c. (4.1.2.2)
Die Konstante C wird Entfernungsmesserkoeffizient genannt. Von Dm "OF haben wir:
Ctg φ / 2 \u003d ОF / m "O; m" O \u003d p / 2 (4.1.2.3)
Ctg φ/2 = (fob*2)/p, (4.1.2.4)
wobei p der Abstand zwischen den Entfernungsmessfäden ist. Als nächstes schreiben wir:
C \u003d f über / p. (4.1.2.5)
Der Entfernungsmesserkoeffizient ist gleich dem Verhältnis der Brennweite des Objektivs zum Abstand zwischen den Entfernungsmesserfilamenten. Normalerweise wird der Koeffizient C gleich 100 genommen, dann ist Ctg φ / 2 = 200 und φ = 34,38 ". Bei C = 100 und fob = 200 mm beträgt der Abstand zwischen den Fäden 2 mm.
4.1.3 Messung der Schrägdistanz mit einem Filamentdistanzmesser
Die Sichtlinie des Rohrs JK beim Messen des Abstands AB hat einen Neigungswinkel ν, und das Segment l wird entlang der Schiene gemessen (Abb. 8). Wenn die Schiene senkrecht zur Sichtlinie des Rohrs installiert wäre, wäre der Neigungsabstand:
D = l 0 * C + c (4.1.3.1)
l 0 = l*Cos ν (4.1.3.2)
D = C*l*Cosν + c. (4.1.3.3)
Der horizontale Abstand der Linie S wird aus Δ JKE bestimmt:
S = D*Cosν (4.1.3.4)
S= C*l*Cos2v + c*Cosv. (4.1.3.5)

Reis. 8 - Messen der Schrägdistanz mit einem Filament-Entfernungsmesser
Der Einfachheit halber nehmen wir den zweiten Term gleich c*Cos2ν ; Da der c-Wert klein ist (ungefähr 30 cm), wird ein solcher Ersatz keinen merklichen Fehler in die Berechnungen einführen. Dann
S = (C * l + c) * Cos 2 ν (4.1.3.6)
S = D"* Cos2v (4.1.3.7)
Normalerweise wird der Wert (C * l + c) als Entfernungsmessung bezeichnet. Bezeichnen wir die Differenz (D" - S) mit ΔD und nennen sie dann die Korrektur für die Reduzierung auf den Horizont
S = D" – ∆D (4.1.3.8)
ΔD = D" * Sin 2 ν (4.1.3.9)
Der Winkel ν wird durch den vertikalen Kreis des Theodoliten gemessen; wobei die Korrektur ΔD nicht berücksichtigt wird. Die Genauigkeit der Entfernungsmessung mit einem Filament-Entfernungsmesser wird normalerweise durch einen relativen Fehler von 1/100 bis 1/300 geschätzt.
Neben dem üblichen Filament-Entfernungsmesser gibt es optische Doppelbild-Entfernungsmesser.
4.2 Konstruktionsmerkmale und Funktionsprinzip
Bei einem Impulslicht-Entfernungsmesser ist die Strahlungsquelle meistens ein Laser, dessen Strahlung in Form von kurzen Impulsen gebildet wird. Zur Messung langsam veränderlicher Entfernungen werden Einzelpulse verwendet, für sich schnell ändernde Entfernungen wird ein gepulster Strahlungsmodus verwendet. Festkörperlaser ermöglichen die Wiederholungsrate von Strahlungsimpulsen bis zu 50-100 Hz, Halbleiter - bis zu 104-105 Hz. Die Bildung kurzer Strahlungspulse in Festkörperlasern erfolgt durch mechanische, elektrooptische oder akusto-optische Shutter oder deren Kombinationen. Injektionslaser werden durch den Injektionsstrom gesteuert.
In Phasenlicht-Entfernungsmessern werden als Lichtquellen Glüh- oder Gaslichtlampen, LEDs und fast alle Arten von Lasern verwendet. Ein optischer Entfernungsmesser mit LEDs bietet eine Reichweite von bis zu 2-5 km, mit Gaslasern beim Arbeiten mit optischen Reflektoren an einem Objekt - bis zu 100 km und bei diffuser Reflexion von Objekten - bis zu 0,8 km; Ebenso bietet der optische Entfernungsmesser mit Halbleiterlasern eine Reichweite von 15 und 0,3 km. Bei Phasenstrahlung im Lichtbereich wird sie durch Interferenz, akusto-optische und elektro-optische Modulatoren moduliert. Elektrooptische Modulatoren, die auf Resonator- und Wellenleiter-Mikrowellenstrukturen basieren, werden in optischen Mikrowellenphasen-Entfernungsmessern verwendet.
Bei Pulslicht-Entfernungsmessern werden üblicherweise Fotodioden als Fotodetektor verwendet, bei Phasenlicht-Entfernungsmessern erfolgt die Fotodetektion durch Fotomultiplier. Die Empfindlichkeit des Lichtempfangspfades eines optischen Entfernungsmessers kann durch Verwendung von optischer Überlagerung um mehrere Größenordnungen erhöht werden. Die Reichweite eines solchen optischen Entfernungsmessers ist durch die Kohärenzlänge des Sendelasers begrenzt, während es möglich ist, Bewegungen und Vibrationen von Objekten bis zu 0,2 km zu registrieren.
Die Messung von Zeitintervallen erfolgt meist nach dem Zählimpulsverfahren.
5. Schlussfolgerung
Entfernungsmesser - ist das beste Gerät zum Messen von Entfernungen über große Entfernungen. Jetzt werden Laser-Entfernungsmesser in militärischer Bodenausrüstung sowie in der Luftfahrt und Marine eingesetzt. Eine Reihe von Entfernungsmessern wurde von vielen Armeen der Welt übernommen. Außerdem ist der Entfernungsmesser zu einem unverzichtbaren Bestandteil der Jagd geworden, was ihn einzigartig und sehr nützlich macht.
6. Bibliographisches Verzeichnis
1. Gerasimov F.Ya., Govorukhin A.M. Kurzes topografisches und geodätisches Wörterbuch-Nachschlagewerk, 1968; M Nedra
Grundkurs für Optik und Entfernungsmesser, Voenizdat, 1938, 136 p.
Militärische optisch-mechanische Geräte, Oboronprom, 1940, 263 p.
4. Internetgeschäft der Optik. Funktionsprinzipien eines Laser-Entfernungsmessers. URL: http://www.optics4you.ru/article5.html
Elektronische Version des Lehrbuchs in Form von Hypertext
in der Disziplin "Geodäsie". URL: http://cheapset.od.ua/4_3_2.html Entfernungsmesser Zusammenfassung >> Geologie
K und f + d = c , erhalten wir D = K n + c , wobei K der Koeffizient ist Entfernungsmesser und c ist eine Konstante Entfernungsmesser. Reis. 8.4. Faden Entfernungsmesser: a) - ein Netzwerk von Fäden; b) - Schema zur Bestimmung von ... Niveaus. Gerät technische Ebenen. Abhängig von Geräte angewandt...
Die Entwicklung von Laserimpuls-Entfernungsmessern war eine der ersten Anwendungen von Lasern in der Militärtechnologie. Die Messung der Entfernung zum Ziel ist eine typische Aufgabe des Artillerieschießens, die lange Zeit mit optischen Mitteln gelöst wurde, jedoch mit unzureichender Genauigkeit, und erforderte sperrige Instrumente und hochqualifiziertes und geschultes Personal. Radar ermöglichte es, die Entfernung zu Zielen zu messen, indem die Verzögerungszeit des vom Ziel reflektierten Funkimpulses gemessen wurde. Das Funktionsprinzip von Quanten-Entfernungsmessern basiert auf der Messung der Durchgangszeit eines Lichtsignals zu einem Ziel und zurück und ist wie folgt: Ein starker kurzzeitiger Strahlungsimpuls, der von einem optischen Quantengenerator (OCG) des Entfernungsmessers erzeugt wird vom optischen System gebildet und auf das Ziel gerichtet, dessen Entfernung gemessen werden muss. Der vom Ziel reflektierte Strahlungsimpuls fällt nach Passieren des optischen Systems auf den Entfernungsmesser-Fotodetektor. Der Zeitpunkt der Ausstrahlung der Sonde und der Zeitpunkt des Empfangs der reflektierten Signale werden von der Triggereinheit (BZ) und dem Fotodetektor (FPU) aufgezeichnet, die elektrische Signale zum Starten und Stoppen des Zeitintervallmessers (IVI) erzeugen. IVI misst das Zeitintervall zwischen den Vorderflanken der emittierten und reflektierten Pulse. Die Entfernung zum Ziel ist proportional zu diesem Intervall und wird durch die Formel bestimmt, wobei die Entfernung zum Ziel m ist; - Lichtgeschwindigkeit in der Atmosphäre, m/s; - gemessenes Zeitintervall, s.
Das Messergebnis in Metern wird auf einer digitalen Anzeige im Sichtfeld des linken Okulars des Entfernungsmessers angezeigt. Um ein optisches Analogon eines Radars zu schaffen, fehlte nur eine leistungsstarke gepulste Lichtquelle mit guter Richtwirkung. Der gütegeschaltete Festkörperlaser war eine hervorragende Lösung für dieses Problem. Die ersten sowjetischen Laser-Entfernungsmesser wurden Mitte der 1960er Jahre von Unternehmen der Verteidigungsindustrie entwickelt, die über umfangreiche Erfahrung in der Herstellung optischer Instrumente verfügten. Das Forschungsinstitut "Pole" befand sich damals noch im Aufbau. Die erste Arbeit des Instituts in diese Richtung war die Entwicklung eines Rubinelements 5,5 x 75 für einen von TsNIIAG erstellten Laser-Entfernungsmesser. Die Entwicklung wurde 1970 mit der Schaffung eines solchen Elements mit Kundenabnahme erfolgreich abgeschlossen. Abteilung des Instituts unter der Leitung von V.M. Krivtsun, in den gleichen Jahren entwickelte er Rubinlaser für Weltraumbahnmessungen und optische Ortung des Mondes. Bei der Erstellung von Festkörperlasern für den Feldeinsatz und deren Andockung an die Geräte des Kunden wurde ein großer Nachholbedarf aufgebaut. Mit unserem Laser führte das Forschungsinstitut für Weltrauminstrumentierung (Direktor - L. I. Gusev, Chefdesigner des Komplexes - V. D. Shargorodsky) eine erfolgreiche optische Ortung von Lunochods durch, die 1972-73 von sowjetischen Raumfahrzeugen an die Oberfläche des Mondes gebracht wurden. Gleichzeitig wurde auch die Position von Lunokhods auf dem Mond durch Scannen eines Laserstrahls bestimmt. In den 1970er Jahren wurden diese Arbeiten durch die Entwicklung eines Ortungslasers aus Neodym-Granat fortgesetzt (Kandela, Chefdesigner Zverev G.M., führende Künstler M.B. Zhitkova, V.V. Shulzhenko, V.P. Myznikov). Vormals für den Einsatz in der Luftfahrt vorgesehen, wurde mit diesem Laser über viele Jahre erfolgreich ein weites Netz von Laserstationen für Satellitenbahnmessungen am Maidanak im Pamir, im Fernen Osten, auf der Krim und in Kasachstan ausgestattet und betrieben. Derzeit arbeitet an diesen Stationen bereits die 3. Generation von Lasern, die am Polyus Research Institute (I. V. Vasiliev, S. V. Sinoviev und andere) entwickelt wurden. Die Erfahrung in der Entwicklung von Lasern für militärische Zwecke ermöglichte es, direkt bei Polyus mit der Entwicklung von Laser-Entfernungsmessern zu beginnen. Die Initiative zur Entwicklung von Entfernungsmessern am Institut, gezeigt von G.M. Zverev, der 1970 die komplexe Abteilung des Instituts für die Entwicklung von aktiven und nichtlinearen Elementen, Festkörperlasern und darauf basierenden Geräten leitete, wurde tatkräftig von Direktor M. F. Stelmakh und der Industrieführung unterstützt.
Anfang der 1970er Jahre verfügte das Institut als einziges im Land über die Technologie zur Züchtung von Einkristallen und elektrooptischen Schaltern, die es ermöglichte, Geräte mit deutlich geringerer Masse und Abmessungen herzustellen. So betrug die typische Pumpenergie eines Rubinlasers für einen Entfernungsmesser 200 J und für einen Granatlaser nur 10 J. Auch die Laserpulsdauer wurde mehrfach reduziert, was die Messgenauigkeit erhöhte. Die erste Entwicklung des Geräts begann Ende der 60er Jahre unter der Leitung von V.M. Krivtsun. Als Layoutidee wählte er ein Schema mit einer einzelnen Linse, wobei ein elektrooptisches Element als Schalter zwischen den Eingangs- und Ausgangskanälen verwendet wurde. Dieses Schema ähnelte dem eines Radars mit einem Antennenschalter. Es wurde ein Laser auf Basis eines YAG:Nd-Kristalls gewählt, der es ermöglichte, eine ausreichende Ausgangsenergie der IR-Strahlung (20 mJ) zu erhalten. V. M. Krivtsun konnte die Entwicklung des Geräts nicht abschließen, er wurde schwer krank und starb 1971. A.G. musste die Entwicklung abschließen. Ershov, der zuvor abstimmbare Laser für die wissenschaftliche Forschung entwickelt hat. Das optische Schema musste auf ein klassisches Schema mit separaten Sender- und Empfängerlinsen geändert werden, da das kombinierte Schema die Beleuchtung des Fotodetektors durch einen starken Sendeimpuls nicht bewältigen konnte. Erfolgreiche umfassende Tests des ersten F&E-Musters des Contrast-2-Geräts fanden im Juni 1971 statt. Die Military Topographical Administration fungierte als Auftraggeber für die F&E des ersten Laser-Entfernungsmessers des Landes. Die Entwicklung wurde in sehr kurzer Zeit abgeschlossen. Bereits 1974 wurde der quantentopografische Entfernungsmesser KTD-1 (Abb. 1.2.1) zur Lieferung angenommen und im Tantal-Werk in Saratov in die Massenproduktion überführt.

Reis. 1.2.1
Mit dieser Entwicklung zeigte sich das Talent der Chefdesignerin A.G. voll und ganz. Ershov, der es geschafft hat, die wichtigsten technischen Lösungen des Geräts richtig auszuwählen, organisiert die Entwicklung seiner Blöcke und Baugruppen, neuer Funktionselemente durch benachbarte Abteilungen. Das Gerät hatte eine Reichweite von bis zu 20 km bei einem Fehler von weniger als 1,7 m. Der Entfernungsmesser KTD-1 wurde viele Jahre in Saratow sowie im VTU-Werk in Moskau in Serie hergestellt. Für den Zeitraum 1974 - 1980. Die Truppen erhielten mehr als 1000 solcher Geräte. Sie wurden erfolgreich bei der Lösung vieler Probleme der militärischen und zivilen Topographie eingesetzt. Am Institut für Laser-Entfernungsmesser würden eine Reihe neuer Elemente entwickelt. In materialwissenschaftlichen Abteilungen unter der Leitung von V.M. Garmash und V.P. Klyuev wurden hochwertige aktive Elemente aus Yttrium-Aluminium-Granat und Yttrium-Aluminat mit Neodym hergestellt. Hinweis: Angert, V.A. Paschkow und A.M. Onishchenko schuf elektrooptische Verschlüsse aus Lithiumniobat, die weltweit keine Analoga haben. In der Abteilung P.A. Tsetlin schuf passive Farbstoffverschlüsse. Auf dieser elementaren Basis hat E.M. Shvom und N.S. Ustimenko entwickelte kleine Laseremitter ILTI-201 und IZ-60 für kleine Entfernungsmesser. Gleichzeitig wurden in der Abteilung A.V. vielversprechende Photodetektoren auf Basis einer Germanium-Avalanche-Photodiode entwickelt. Ievsky V.A. Afanasiev und M. M. Zemlyanov. Der erste kleine (in Form eines Fernglases) Laser-Entfernungsmesser LDI-3 (Abb. 1.2.2) wurde 1977 und 1980 auf dem Testgelände getestet. Staatliche Prüfungen wurden erfolgreich durchgeführt.

Reis. 1.2.2
Das Gerät wurde im Radiotube-Werk Uljanowsk seriell gemastert. 1982 wurden staatliche Vergleichstests des LDI-3-Geräts und des 1D13-Geräts durchgeführt, die im Auftrag der Region Moskau vom Kazan Optical and Mechanical Plant entwickelt wurden. Aus mehreren Gründen versuchte die Kommission, dem KOMZ-Gerät den Vorzug zu geben, der einwandfreie Betrieb des Entfernungsmessers des Polyus Research Institute während der Tests führte jedoch dazu, dass beide Geräte zur Abnahme für die Lieferung und Massenproduktion empfohlen wurden: 1D13 für die Bodentruppen und LDI-3 für die Marine. In nur 10 Jahren wurden mehrere tausend LDI-3-Geräte und seine Weiterentwicklung LDI-3-1 in Produktion genommen. In den späten 80er Jahren entwickelte sich A.G. Ershov letzte Version Entfernungsmesser-Fernglas LDI-3-1M mit einer Masse von weniger als 1,3 kg. Sie stellte sich heraus späteste Arbeit talentierter Chefdesigner, der Anfang 1989 verstarb.
Die mit KTD-1 begonnene Entwicklungslinie für WTU wurde mit neuen Geräten fortgesetzt. Als Ergebnis der kreativen Zusammenarbeit zwischen dem Polyus Research Institute und dem 29. Scientific Research Institute of Military and Technical Cooperation wurde ein Entfernungsmesser geschaffen - der Gyrotheodolit DGT-1 ("Captain"), der Entfernungen zu Objekten am Boden mit einem Fehler misst von weniger als 1 m und Winkelkoordinaten - genauer gesagt 20 Bogensekunden. 1986 wurde ein Laser-Entfernungsmesser KTD-2-2 entwickelt und zur Lieferung angenommen - eine Düse auf Theodolit (Abb. 1.2.3).

Reis. 1.2.3
In den 1970er Jahren wurden grundlegend neue Quantenentfernungsmesser (DAK-1, DAK-2, 1D5 usw.) in Dienst gestellt. Sie ermöglichten in kurzer Zeit mit hoher Genauigkeit die Bestimmung der Koordinaten von Objekten (Zielen) und Granatenexplosionen. Um sich von der Überlegenheit ihrer Eigenschaften zu überzeugen, reicht es aus, die mittleren Fehler bei der Messung der Reichweite zu vergleichen: DS-1 - 1,5 Prozent. (mit einer Beobachtungsreichweite von bis zu 3 km), DAK - 10 m (unabhängig von der Reichweite) Die Verwendung von Entfernungsmessern ermöglichte es, die Erkennungszeit von Zielen erheblich zu verkürzen, die Wahrscheinlichkeit ihrer Öffnung bei Tag und Nacht zu erhöhen und dadurch erhöhen Sie die Wirksamkeit des Artilleriefeuers. Artillerie-Quantenentfernungsmesser sind eines der wichtigsten Aufklärungsmittel in Artillerieeinheiten. Neben dem Hauptzweck - der Entfernungsmessung - ermöglichen Quantenentfernungsmesser die Lösung der Probleme der visuellen Aufklärung des Geländes und des Feindes, der Korrektur des Feuers, der Messung horizontaler und vertikaler Winkel, der topografischen und geodätischen Bindung von Elementen der Kampfformationen Artillerieeinheiten. Darüber hinaus ermöglicht der Laser-Entfernungsmesser-Zielbezeichner 1D15 die Beleuchtung von Zielen mit Laserstrahlung mit semiaktiver Führung bei Feuereinsätzen mit hochpräziser Munition mit Zielsuchköpfen. Derzeit sind folgende Arten von Quanten-Entfernungsmessern im Einsatz: Entfernungsmesser-Artillerie-Quantum DAK-2 (1D11) und seine Modifikationen DAK-2M-1 (1D11M-1) und DAK-2M-2 (1D11M-2), Laseraufklärungsgerät LPR-1 (1D13), Entfernungsmesser-Bezeichnung 1D15.