คณะกรรมการแห่งสหพันธรัฐรัสเซียเพื่อการอุดมศึกษา อุปกรณ์สำหรับส่งทิศทางของเป้าหมายและสัญญาณ
อยู่ในมือของผู้สังเกตการณ์ขั้นสูงของกองทัพอิตาลี อุปกรณ์ลาดตระเวน Elbit PLDRII และกำหนดเป้าหมายซึ่งให้บริการกับลูกค้าจำนวนมากรวมถึงนาวิกโยธินซึ่งมีการกำหนด AN / PEQ-17
มองหาจุดมุ่งหมาย
ในการสร้างพิกัดเป้าหมาย ระบบเก็บข้อมูลต้องทราบตำแหน่งของตัวเองก่อน จากนั้น เธอสามารถกำหนดระยะไปยังเป้าหมายและมุมของระยะหลังที่สัมพันธ์กับเสาจริงได้ ระบบเฝ้าระวัง (ควรเป็นทั้งกลางวันและกลางคืน) ระบบกำหนดตำแหน่งที่แม่นยำ เครื่องวัดระยะด้วยเลเซอร์ เข็มทิศแม่เหล็กดิจิตอลเป็นส่วนประกอบทั่วไปของอุปกรณ์ดังกล่าว ยังเป็นความคิดที่ดีในระบบดังกล่าวที่จะมีอุปกรณ์ติดตามที่สามารถระบุลำแสงเลเซอร์ที่เข้ารหัสเพื่อยืนยันเป้าหมายไปยังนักบิน ซึ่งทำให้เพิ่มความปลอดภัยและลดการแลกเปลี่ยนการสื่อสาร ในทางกลับกัน พอยน์เตอร์ไม่ทรงพลังพอที่จะเล็งอาวุธ แต่ให้คุณทำเครื่องหมายเป้าหมายสำหรับผู้ออกแบบภาคพื้นดินหรือในอากาศ (ทางอากาศ) ซึ่งท้ายที่สุดจะชี้แบบกึ่งแอคทีฟ หัวเลเซอร์กระสุนกลับบ้านไปยังเป้าหมาย สุดท้าย เรดาร์ระบุตำแหน่งปืนใหญ่ช่วยให้คุณสามารถระบุตำแหน่งของปืนใหญ่ของศัตรูได้อย่างแม่นยำ แม้ว่า (และส่วนใหญ่มักเกิดขึ้น) จะไม่อยู่ในแนวสายตา ดังที่กล่าวไว้ในการตรวจสอบนี้จะมีการพิจารณาเฉพาะระบบแบบแมนนวลเท่านั้น
เพื่อให้เข้าใจถึงสิ่งที่กองทัพต้องการในมือ ลองดูข้อกำหนดที่เผยแพร่โดยกองทัพสหรัฐฯ ในปี 2014 สำหรับการลาดตระเวนด้วยเลเซอร์ LTLM (Laser Target Location Module) II และอุปกรณ์กำหนดเป้าหมาย ซึ่งท้ายที่สุดแล้วควรแทนที่ด้วยอาวุธ LTLM เวอร์ชันก่อนหน้า กองทัพบกคาดว่าอุปกรณ์ที่มีน้ำหนัก 1.8 กก. (สูงสุด 1.6 กก.) แม้ว่าทั้งระบบ ซึ่งรวมถึงตัวอุปกรณ์ สายเคเบิล ขาตั้งสามขา และชุดทำความสะอาดเลนส์ จะสามารถยกบาร์ขึ้นได้ 4.8 กก. อย่างดีที่สุดเป็น 3.85 กก. โดยการเปรียบเทียบ โมดูล LTLM ปัจจุบันมีน้ำหนักฐาน 2.5 กก. และน้ำหนักรวม 5.4 กก. เกณฑ์ข้อผิดพลาดของตำแหน่งเป้าหมายถูกกำหนดเป็น 45 เมตรที่ 5 กิโลเมตร (เหมือนกับ LTLM) ความน่าจะเป็นของข้อผิดพลาดแบบวงกลมในทางปฏิบัติ (CEP) ที่ 10 เมตรที่ 10 กิโลเมตร สำหรับการใช้งานในเวลากลางวัน LTLM II จะมีกำลังขยายต่ำสุดที่ x7 มุมมองภาพขั้นต่ำที่ 6°x3.5° มาตราส่วนช่องมองภาพเพิ่มขึ้นทีละ 10 ล้าน และกล้องถ่ายภาพสีในเวลากลางวัน จะให้สตรีมมิ่งวิดีโอและมุมมองกว้าง 6°x4.5° รับประกันอัตราการจดจำ 70% ที่ 3.1 กม. และการระบุที่ 1.9 กม. ในสภาพอากาศแจ่มใส ขอบเขตการมองเห็นที่แคบไม่ควรเกิน 3°x2.25° โดยควร 2.5°x1.87° โดยมีระยะการจดจำที่เหมาะสม 4.2 หรือ 5 กม. และระยะการระบุที่ 2.6 หรือ 3.2 กม. ช่องถ่ายภาพความร้อนจะมีช่องมองภาพเป้าหมายเหมือนกัน โดยมีโอกาสรับรู้ 70% ที่ 0.9 และ 2 กม. และระบุตำแหน่งที่ 0.45 และ 1 กม. ข้อมูลเป้าหมายจะถูกเก็บไว้ในหน่วยพิกัด UTM/UPS และข้อมูลและภาพจะถูกส่งผ่านตัวเชื่อมต่อ RS-232 หรือ USB 2.0 ใช้พลังงานจากแบตเตอรี่ลิเธียม L91 AA ความสามารถขั้นต่ำในการสร้างการสื่อสารควรจัดเตรียมโดยเครื่องรับ GPS น้ำหนักเบาที่มีความแม่นยำสูง PLGR (เครื่องรับ GPS น้ำหนักเบาที่มีความแม่นยำ) และเครื่องรับ GPS ขั้นสูงสำหรับทหาร DAGR (Defense Advanced GPS Receiver) รวมทั้งระบบ GPS ที่พัฒนาขึ้น อย่างไรก็ตาม กองทัพต้องการระบบที่สามารถเชื่อมต่อกับอุปกรณ์ Forward Entry ขนาดพกพา ซอฟต์แวร์/ระบบ Forward Observer, Force XXI Battle Command, Brigade-and-Below และ Network Soldier System Net Warrior
BAE Systems นำเสนออุปกรณ์สอดแนมและกำหนดเป้าหมายสองแบบ UTB X-LRF เป็นวิวัฒนาการของอุปกรณ์ UTB X ซึ่งมีการเพิ่มเครื่องวัดระยะด้วยเลเซอร์ Class 1 ด้วยระยะ 5.2 กม. อุปกรณ์นี้ใช้เมทริกซ์การถ่ายภาพความร้อนที่ไม่มีการระบายความร้อนขนาด 640x480 พิกเซลที่มีระยะห่าง 17 ไมครอนสามารถมีเลนส์ที่มีความยาวโฟกัส 40, 75 และ 120 มม. พร้อมกำลังขยายที่สอดคล้องกัน x2.1, x3.7 และ x6.6 , ระยะการมองเห็น 19°, 10.5° และ 6.5° และซูมอิเล็กทรอนิกส์ x2 จากข้อมูลของ BAE Systems ช่วงของการตรวจจับที่เป็นบวก (ความน่าจะเป็น 80%) ของเป้าหมายมาตรฐานของ NATO ที่มีพื้นที่ 0.75 m2 คือ 1010, 2220 และ 2660 เมตรตามลำดับ UTB X-LRF ติดตั้งระบบ GPS ที่มีความแม่นยำ 2.5 เมตรและเข็มทิศแม่เหล็กดิจิตอล นอกจากนี้ยังมีตัวชี้เลเซอร์ Class 3B ในสเปกตรัมที่มองเห็นและอินฟราเรด เครื่องมือนี้สามารถจัดเก็บภาพได้มากถึงหนึ่งร้อยภาพในรูปแบบ BMP ที่ไม่มีการบีบอัด ใช้พลังงานจากแบตเตอรี่ลิเธียม L91 สี่ก้อนซึ่งใช้งานได้ห้าชั่วโมง แม้ว่าเครื่องมือนี้สามารถเชื่อมต่อกับแหล่งพลังงานภายนอกผ่านพอร์ต USB ได้ UTB X-LRF มีความยาว 206 มม. กว้าง 140 มม. และสูง 74 มม. น้ำหนัก 1.38 กก. ไม่รวมแบตเตอรี่

ในกองทัพสหรัฐฯ Trigr ของ BAE Systems เป็นที่รู้จักในชื่อ Laser Target Locator Module ซึ่งมีอาร์เรย์การถ่ายภาพความร้อนที่ไม่มีการระบายความร้อนและมีน้ำหนักน้อยกว่า 2.5 กก.

อุปกรณ์ UTB X-LRF เป็นการพัฒนาเพิ่มเติมของ UTB X โดยได้เพิ่มตัวค้นหาระยะด้วยเลเซอร์ ซึ่งทำให้สามารถเปลี่ยนอุปกรณ์ให้เป็นระบบลาดตระเวณ การเฝ้าระวัง และการกำหนดเป้าหมายที่ครบถ้วน
อีกผลิตภัณฑ์หนึ่งจาก BAE Systems คือ Trigr (Target Reconnaissance Infrared GeoLocating Rangefinder) เลเซอร์สอดแนมและอุปกรณ์กำหนดเป้าหมาย ซึ่งพัฒนาขึ้นโดยความร่วมมือกับ Vectronix BAE Systems จัดหาเครื่องมือที่มีตัวสร้างภาพความร้อนแบบไม่ระบายความร้อนและตัวรับ GPS ที่มีความพร้อมใช้งานที่ล้ำสมัย ในขณะที่ Vectronix ให้เลนส์กำลังขยาย x7, เครื่องวัดระยะด้วยแสงเลเซอร์แบบไฟเบอร์ 5 กม. และเข็มทิศแม่เหล็กแบบดิจิตอล ตามที่ บริษัท อุปกรณ์ Trigr รับประกัน CEP 45 เมตรที่ระยะทาง 5 กม. ช่วงการจดจำในระหว่างวันคือ 4.2 กม. หรือมากกว่า 900 เมตรในเวลากลางคืน อุปกรณ์มีน้ำหนักน้อยกว่า 2.5 กก. สองชุดรับประกันการทำงานตลอด 24 ชั่วโมง ทั้งระบบพร้อมขาตั้ง แบตเตอรี่ และสายเคเบิล มีน้ำหนัก 5.5 กก. ในกองทัพสหรัฐฯ อุปกรณ์ดังกล่าวได้รับตำแหน่ง Laser Target Locator Module ในปี 2552 เธอเซ็นสัญญาเป็นเวลาห้าปีโดยไม่ระบุรายละเอียด และอีกสองสัญญาในเดือนสิงหาคม 2555 และมกราคม 2556 มูลค่า 23.5 ล้านดอลลาร์และ 7 ล้านดอลลาร์ตามลำดับ
อุปกรณ์ตรวจจับและกำหนดเป้าหมายด้วยเลเซอร์ Mark VII แบบใช้มือถือของ Northrop Grumman ถูกแทนที่ด้วยอุปกรณ์ Mark VIIE ที่ได้รับการปรับปรุง รุ่นนี้ได้รับช่องถ่ายภาพความร้อนแทนช่องเพิ่มความสว่างของภาพในรุ่นก่อนหน้า เซ็นเซอร์ที่ไม่มีการระบายความร้อนช่วยเพิ่มทัศนวิสัยในเวลากลางคืนและในสภาวะที่ยากลำบาก มีมุมมองภาพ 11.1°x8.3° ช่องสัญญาณในเวลากลางวันใช้เลนส์มองไปข้างหน้าด้วยกำลังขยาย x8.2 และระยะการมองเห็น 7°x5° เข็มทิศแม่เหล็กดิจิตอลมีความแม่นยำ ±8 มิล เครื่องวัดความเอียงแบบอิเล็กทรอนิกส์มีความแม่นยำ ±4 มิล และระบุตำแหน่งโดยโมดูลป้องกันการรบกวนแบบเลือกได้ของ GPS/SAASM เครื่องวัดระยะด้วยเลเซอร์ Nd-Yag (เลเซอร์บนโกเมนอิตเทรียม-อะลูมิเนียมพร้อมนีโอไดเมียม) พร้อมการสร้างพารามิเตอร์เชิงแสง ช่วงสูงสุด 20 กม. ด้วยความแม่นยำ ±3 เมตร Mark VIIE มีน้ำหนัก 2.5 กก. พร้อมเซลล์ CR123 เชิงพาณิชย์ 9 เซลล์ และติดตั้งอินเทอร์เฟซข้อมูล RS-232/422
ผลิตภัณฑ์ใหม่ล่าสุดในกลุ่มผลิตภัณฑ์ของ Northrop Grumman คือ HHPTD (Hand Held Precision Targeting Device) ซึ่งมีน้ำหนักน้อยกว่า 2.26 กก. เมื่อเปรียบเทียบกับรุ่นก่อน มันมีช่องสีในเวลากลางวัน เช่นเดียวกับโมดูลการนำทางท้องฟ้าที่ไม่ใช่แม่เหล็ก ซึ่งปรับปรุงความแม่นยำให้อยู่ในระดับที่อาวุธนำวิถีด้วย GPS ที่ทันสมัยอย่างมาก สัญญามูลค่า 9.2 ล้านดอลลาร์ในการพัฒนาอุปกรณ์นี้ได้รับรางวัลในเดือนมกราคม 2556 โดยความร่วมมือกับ Flir, General Dynamics และ Wilcox ในเดือนตุลาคม 2014 อุปกรณ์ได้รับการทดสอบที่พิสัยทรายขาว

อุปกรณ์กำหนดเป้าหมายที่แม่นยำแบบมือถือเป็นหนึ่งในการพัฒนาล่าสุดของ Northrop Grumman; การทดสอบที่ครอบคลุมได้ดำเนินการเมื่อสิ้นปี 2014

ช่องหลักของตระกูล Flir Recon B2 คือช่องถ่ายภาพความร้อนที่ระบายความร้อน อุปกรณ์ B2-FO พร้อมช่องสัญญาณในเวลากลางวันเพิ่มเติมในมือของหน่วยคอมมานโดอิตาลี (ในภาพ)
Flir มีอุปกรณ์กำหนดเป้าหมายแบบใช้มือถือหลายตัวในพอร์ตโฟลิโอและทำงานร่วมกับบริษัทอื่นๆ เพื่อจัดหาอุปกรณ์มองเห็นตอนกลางคืนสำหรับระบบดังกล่าว Recon B2 มีช่องทางถ่ายภาพความร้อนหลักที่ทำงานในช่วง IR กลาง เซ็นเซอร์อินเดียมแอนติโมไนด์ที่ระบายความร้อนด้วย 640x480 ให้มุมมองภาพกว้าง 10°x8°, มุมมองภาพแคบ 2.5°x1.8° และการซูมแบบอิเล็กทรอนิกส์ต่อเนื่อง x4 ช่องถ่ายภาพความร้อนมาพร้อมกับโฟกัสอัตโนมัติ การควบคุมการเพิ่มความสว่างอัตโนมัติ และการปรับปรุงข้อมูลดิจิตอล ช่องเสริมสามารถติดตั้งเซ็นเซอร์วัน (รุ่น B2-FO) หรือช่องอินฟราเรดไกล (รุ่น B2-DC) ตัวแรกใช้กล้อง CCD สีขนาด 1/4" ที่มีเมทริกซ์ขนาด 794x494 พร้อมซูมดิจิตอลแบบต่อเนื่อง x4 และมุมมองภาพสองช่องเดียวกันกับรุ่นก่อนหน้า ช่องถ่ายภาพความร้อนเสริมใช้ไมโครโบโลมิเตอร์ขนาด 640x480 บนวาเนเดียมออกไซด์และให้ กำลังขยาย 18 x4 หนึ่งตัว B2 มีโมดูล GPS C/A (รหัสการได้มาซึ่งหยาบ) (อย่างไรก็ตาม โมดูล GPS มาตรฐานทางการทหารสามารถสร้างขึ้นเพื่อปรับปรุงความแม่นยำได้) เข็มทิศแม่เหล็กดิจิตอลและตัวค้นหาระยะด้วยเลเซอร์ที่มีช่วง 20 กม. และตัวชี้เลเซอร์คลาส 3B 852 นาโนเมตร B2 สามารถจัดเก็บภาพ jpeg ได้มากถึง 1,000 ภาพที่สามารถอัพโหลดผ่าน USB หรือ RS-232/422, NTSC/PAL และ HDMI สำหรับการบันทึกวิดีโอนอกจากนี้ยังมีเครื่องมือที่มีน้ำหนักน้อยกว่า 4 กก. รวมแบตเตอรี่ D หกก้อนสำหรับการทำงานต่อเนื่องสี่ชั่วโมงหรือนานกว่าห้าชั่วโมงในการประหยัดพลังงาน โหมด. Recon B2 สามารถติดตั้งชุดรีโมตคอนโทรลที่มีขาตั้งกล้อง หัวแพน/เอียง กล่องจ่ายไฟและการสื่อสาร และกล่องควบคุม

Flir นำเสนออุปกรณ์เฝ้าระวังและกำหนดเป้าหมาย Recon V รุ่นที่เบากว่า ซึ่งรวมถึงเซ็นเซอร์อุณหภูมิ เครื่องค้นหาระยะ และเซ็นเซอร์ทั่วไปอื่นๆ ที่บรรจุในกล่องขนาด 1.8 กก.
รุ่นน้ำหนักเบากว่า Recon B9-FO มีช่องภาพความร้อนแบบไม่ระบายความร้อนด้วยมุมมองภาพ 9.3°x7° และซูมดิจิตอล x4 กล้องสีมีการซูมต่อเนื่อง x10 และซูมดิจิตอล x4 ในขณะที่เครื่องรับ GPS เข็มทิศดิจิตอล และคุณลักษณะตัวชี้เลเซอร์จะเหมือนกับ B2 ความแตกต่างหลักอยู่ที่เครื่องวัดระยะซึ่งมีระยะสูงสุด 3 กม. B9-FO ออกแบบมาเพื่อการใช้งานในระยะที่สั้นกว่า มันยังมีน้ำหนักน้อยกว่า B2 อย่างมาก ซึ่งน้อยกว่า 2.5 กก. พร้อมแบตเตอรี่ D สองก้อนที่ใช้งานได้ต่อเนื่องห้าชั่วโมง
เมื่อไม่มีช่องสัญญาณวัน Recon V มีน้ำหนักเพียง 1.8 กก. พร้อมแบตเตอรี่ที่ให้การทำงานแบบ Hot-swap ได้นานถึงหกชั่วโมง เมทริกซ์ระบายความร้อนด้วย indium antimonide ขนาด 640x480 ทำงานในช่วงกลาง IR ของสเปกตรัม มีเลนส์ที่มีกำลังขยาย x10 (มุมมองภาพกว้าง 20°x15°) อุปกรณ์เรนจ์ไฟนได้รับการออกแบบสำหรับระยะ 10 กม. ในขณะที่ไจโรสโคปที่ใช้ระบบเครื่องกลไฟฟ้าขนาดเล็กจะช่วยป้องกันภาพสั่นไหว
Sagem บริษัทสัญชาติฝรั่งเศสนำเสนอโซลูชันกล้องสองตาสามตัวสำหรับการตรวจจับเป้าหมายทั้งกลางวันและกลางคืน โดยทั้งหมดมีช่องสีในเวลากลางวันที่เหมือนกันด้วยมุมมองภาพ 3°x2.25°, เครื่องวัดระยะด้วยเลเซอร์ที่ปลอดภัยต่อดวงตา 10 กม., เข็มทิศแม่เหล็กดิจิตอลที่มีมุมแอซิมัท 360° และมุมระดับความสูง ±40° และ GPS C/S โมดูลที่มีความแม่นยำสูงถึงสามเมตร (อุปกรณ์สามารถเชื่อมต่อกับโมดูล GPS ภายนอก) ความแตกต่างที่สำคัญระหว่างอุปกรณ์อยู่ในช่องถ่ายภาพความร้อน
กล้องส่องทางไกลเอนกประสงค์ Jim UC ที่มีเซ็นเซอร์ 640x480 แบบไม่มีการระบายความร้อนที่มีมุมมองภาพกลางคืนและกลางวันเหมือนกัน ในขณะที่มุมมองภาพกว้าง 8.6°x6.45° Jim UC มาพร้อมกับการซูมแบบดิจิตอล ระบบป้องกันภาพสั่นไหว การบันทึกวิดีโอและภาพถ่ายในตัว ฟังก์ชันฟิวชั่นรูปภาพเสริมระหว่างช่องสัญญาณภาพกลางวันและช่องถ่ายภาพความร้อน นอกจากนี้ยังมีตัวชี้เลเซอร์ 0.8µm ที่ปลอดภัยต่อดวงตา พร้อมพอร์ตอนาล็อกและดิจิตอล หากไม่มีแบตเตอรี่ กล้องส่องทางไกลจะมีน้ำหนัก 2.3 กก. แบตเตอรี่แบบชาร์จไฟได้ให้การทำงานต่อเนื่องมากกว่าห้าชั่วโมง

กล้องส่องทางไกลเอนกประสงค์ Jim Long Range ของ บริษัท Sagem ของฝรั่งเศสถูกส่งมอบให้กับทหารราบฝรั่งเศสโดยเป็นส่วนหนึ่งของอุปกรณ์ต่อสู้ Felin; ในภาพ กล้องส่องทางไกลติดตั้งอยู่บนอุปกรณ์กำหนดเป้าหมาย Sterna จาก Vectronix
ถัดมาคือกล้องส่องทางไกลเอนกประสงค์ Jim LR ที่ล้ำหน้ากว่าซึ่งอุปกรณ์ UC นั้น "แตกหน่อ" มันให้บริการกับกองทัพฝรั่งเศสซึ่งเป็นส่วนหนึ่งของยุทโธปกรณ์ของทหารฝรั่งเศสเฟลิน Jim LR นำเสนอช่องสัญญาณภาพความร้อนพร้อมเซ็นเซอร์ 320x240 พิกเซลที่ทำงานในช่วง 3-5 µm; ขอบเขตการมองเห็นที่แคบจะเหมือนกับรุ่น UC และขอบเขตการมองเห็นที่กว้างคือ 9°x6.75° ตัวชี้เลเซอร์ที่ทรงพลังยิ่งขึ้นซึ่งเพิ่มช่วงจาก 300 เป็น 2500 เมตร เป็นตัวเลือก ระบบทำความเย็นจะเพิ่มมวลของอุปกรณ์ Jim LR เป็น 2.8 กก. โดยไม่ต้องใช้แบตเตอรี่ อย่างไรก็ตาม โมดูลถ่ายภาพความร้อนแบบระบายความร้อนช่วยเพิ่มประสิทธิภาพการทำงานได้อย่างมาก ช่วงการตรวจจับ การจดจำ และการระบุตัวบุคคลอยู่ที่ 3/1/0.5 กม. สำหรับรุ่น UC และ 7/2.5/1.2 กม. สำหรับรุ่น LR
กล้องส่องทางไกลเอนกประสงค์ Jim HR สมบูรณ์แบบด้วยประสิทธิภาพที่สูงกว่า ด้วยเมทริกซ์ VGA 640x480 ความละเอียดสูง
แผนก Sagem ของ Vectronix มีแพลตฟอร์มการเฝ้าระวังสองแพลตฟอร์ม ซึ่งเมื่อเชื่อมต่อกับระบบจาก Vectronix และ/หรือ Sagem จะสร้างเครื่องมือกำหนดเป้าหมายแบบแยกส่วนที่แม่นยำอย่างยิ่ง
เข็มทิศแม่เหล็กดิจิตอลที่มาพร้อมกับสถานีสังเกตการณ์ดิจิทัล GonioLight มีความแม่นยำถึง 5 mils (0.28°) การเชื่อมต่อไจโรสโคปที่แท้จริง (ทางภูมิศาสตร์) ช่วยเพิ่มความแม่นยำได้ถึง 1 ล้าน (0.06°) มีการติดตั้งไจโรสโคปขนาด 4.4 กก. ระหว่างตัวสถานีกับขาตั้งกล้อง ส่งผลให้น้ำหนักรวมของ GonioLight, ไจโรสโคป และขาตั้งกล้องมีแนวโน้มที่ 7 กก. หากไม่มีไจโรสโคป ความแม่นยำดังกล่าวสามารถทำได้โดยใช้ขั้นตอนการอ้างอิงภูมิประเทศในตัวโดยใช้จุดสังเกตหรือวัตถุท้องฟ้าที่เป็นที่รู้จัก ระบบมีโมดูล GPS ในตัวและช่องทางเข้าถึงโมดูล GPS ภายนอก สถานี GonioLight ติดตั้งหน้าจอเรืองแสงและมีอินเทอร์เฟซสำหรับคอมพิวเตอร์ อุปกรณ์สื่อสาร และอุปกรณ์ภายนอกอื่นๆ ในกรณีที่เกิดความผิดปกติ ระบบจะมีมาตราส่วนเสริมเพื่อกำหนดทิศทางและมุมแนวตั้ง ระบบอนุญาตให้คุณยอมรับอุปกรณ์เฝ้าระวังทั้งกลางวันและกลางคืนและเรนจ์ไฟนเตอร์ เช่น เครื่องวัดระยะในตระกูล Vector หรือกล้องส่องทางไกล Sagem Jim ที่อธิบายไว้ข้างต้น การติดตั้งแบบพิเศษที่ส่วนบนของสถานี GonioLight ยังช่วยให้สามารถติดตั้งระบบย่อยออปโตอิเล็กทรอนิกส์สองระบบได้ น้ำหนักรวมจะแตกต่างกันไปตั้งแต่ 9.8 กก. ในการกำหนดค่า GLV ซึ่งรวมถึง GonioLight บวกกับเครื่องวัดระยะเวกเตอร์ เป็น 18.1 กก. ในการกำหนดค่า GL G-TI ซึ่งรวมถึง GonioLight, Vector, Jim-LR และไจโรสโคป สถานีสังเกตการณ์ GonioLight ได้รับการพัฒนาในช่วงต้นทศวรรษ 2000 และตั้งแต่นั้นมา ระบบเหล่านี้มากกว่า 2,000 ระบบได้ถูกส่งไปยังหลายประเทศ สถานีนี้ยังใช้ในการปฏิบัติการรบในอิรักและอัฟกานิสถาน
ประสบการณ์ของ Vectronix ช่วยให้พวกเขาพัฒนาระบบกำหนดเป้าหมาย Sterna ที่ไม่ใช่แม่เหล็กที่เบาเป็นพิเศษ หาก GonioLite ได้รับการออกแบบสำหรับช่วงที่มากกว่า 10 กม. ให้ Sterna สำหรับช่วง 4-6 กม. เมื่อใช้ร่วมกับขาตั้งกล้อง ระบบนี้มีน้ำหนักประมาณ 2.5 กก. และมีความแม่นยำน้อยกว่า 1 ไมล์ (0.06°) ในทุกละติจูดโดยใช้จุดสังเกตที่รู้จัก วิธีนี้ช่วยให้คุณได้รับข้อผิดพลาดตำแหน่งเป้าหมายน้อยกว่าสี่เมตรในระยะทาง 1.5 กม. ในกรณีที่ไม่มีจุดสังเกต ระบบ Sterna จะติดตั้งไจโรสโคปเรโซแนนซ์เรโซแนนซ์ครึ่งวงกลมซึ่งพัฒนาโดย Sagem และ Vectronix ซึ่งให้ความแม่นยำ 2 ไมล์ (0.11°) ในการกำหนดทิศเหนือจริงเป็นละติจูด 60° เวลาตั้งค่าและการวางแนวน้อยกว่า 150 วินาที และต้องมีการจัดตำแหน่งคร่าวๆ ±5° Sterna ใช้พลังงานจากเซลล์ CR123A สี่เซลล์ โดยสามารถกำหนดทิศทางได้ 50 ทิศทาง และวัดค่าได้ 500 ครั้ง เช่นเดียวกับ GonlioLight ระบบ Sterna สามารถรองรับระบบออปโตอิเล็กทรอนิกส์ประเภทต่างๆ ได้ ตัวอย่างเช่น กลุ่มผลิตภัณฑ์ของ Vectronix ประกอบด้วยเครื่องมือที่เบาที่สุดที่น้อยกว่า 3 กก., PLRF25C และ Moskito ที่หนักกว่าเล็กน้อย (น้อยกว่า 4 กก.) เล็กน้อย สำหรับงานที่ซับซ้อนมากขึ้น คุณสามารถเพิ่มอุปกรณ์ Vector หรือ Jim ได้ แต่น้ำหนักจะเพิ่มขึ้นเป็น 6 กก. ระบบ Sterna มีจุดยึดพิเศษสำหรับการติดตั้งรองแหนบ ยานพาหนะซึ่งสามารถลบออกได้อย่างรวดเร็วสำหรับการลงจากหลังม้า เพื่อประเมินระบบเหล่านี้ในปริมาณมากถูกส่งไปยังกองทัพ กองทัพสหรัฐฯ สั่งให้ระบบมือถือ Vectronix และระบบ Sterna เป็นส่วนหนึ่งของข้อกำหนดอุปกรณ์กำหนดเป้าหมายความแม่นยำสูงแบบใช้มือถือที่ออกในเดือนกรกฎาคม 2555 Vectronix มั่นใจในยอดขายที่เพิ่มขึ้นอย่างต่อเนื่องของระบบ Sterna ในปี 2558
ในเดือนมิถุนายน 2014 Vectronix ได้แสดงอุปกรณ์เฝ้าระวัง Moskito TI และอุปกรณ์กำหนดเป้าหมายด้วยสามช่องสัญญาณ: ออปติคัลในเวลากลางวันพร้อมกำลังขยาย x6, ออปติคัล (เทคโนโลยี CMOS) พร้อมการเพิ่มความสว่าง (ทั้งคู่พร้อมมุมมอง 6.25 °) และการถ่ายภาพความร้อนที่ไม่มีการระบายความร้อนด้วย 12 ° มุมมอง อุปกรณ์ยังมีเครื่องวัดระยะ 10 กม. ที่มีความแม่นยำ ±2 เมตร และเข็มทิศดิจิตอลที่มีความแม่นยำ ±10 mils (±0.6°) ในมุมแอซิมัท และ ±3 mils (±0.2°) ในระดับความสูง โมดูล GPS เป็นอุปกรณ์เสริม แม้ว่าจะมีตัวเชื่อมต่อสำหรับเครื่องรับ GPS ภายนอกและพลเรือน ตลอดจนโมดูล Galileo หรือ GLONASS สามารถเชื่อมต่อตัวชี้เลเซอร์ได้ อุปกรณ์ Moskito TI มีอินเทอร์เฟซ RS-232, USB 2.0 และอีเธอร์เน็ต การสื่อสารไร้สาย Bluetooth เป็นตัวเลือก ใช้พลังงานจากแบตเตอรี่สามก้อนหรือแบตเตอรี่ CR123A ให้การทำงานอย่างต่อเนื่องนานกว่าหกชั่วโมง และสุดท้าย ระบบทั้งหมดข้างต้นบรรจุในอุปกรณ์ขนาด 130x170x80 มม. ที่มีน้ำหนักน้อยกว่า 1.3 กก. ผลิตภัณฑ์ใหม่นี้เป็นการพัฒนาเพิ่มเติมของรุ่น Moskito ซึ่งมีน้ำหนัก 1.2 กก. มีช่องสัญญาณในเวลากลางวันและช่องสัญญาณที่มีการเพิ่มประสิทธิภาพความสว่าง, เครื่องวัดระยะด้วยเลเซอร์ที่มีระยะ 10 กม., เข็มทิศดิจิตอล สามารถรวมอุปกรณ์เสริมของ GPS มาตรฐานพลเรือนหรือเชื่อมต่อกับเครื่องรับ GPS ภายนอกได้
Thales นำเสนอระบบการลาดตระเวน การเฝ้าระวัง และการกำหนดเป้าหมายอย่างครบถ้วน ระบบ Sophie UF ขนาด 3.4 กก. มีช่องแสงกลางวันพร้อมกำลังขยาย x6 และมุมมองภาพ 7° ช่วงของเครื่องวัดระยะด้วยเลเซอร์ถึง 20 กม. Sophie UF สามารถติดตั้งรหัส GPS P (Y) (รหัสที่เข้ารหัสสำหรับตำแหน่งที่แน่นอนของวัตถุ) หรือเครื่องรับรหัส C / A (รหัสตำแหน่งหยาบสำหรับวัตถุ) ซึ่ง สามารถเชื่อมต่อกับเครื่องรับ DAGR / PLGR ภายนอกได้ เข็มทิศดิจิตอลแบบแม่เหล็กที่มีความแม่นยำในแนวราบ 0.5° และเครื่องวัดความเอียงของเซ็นเซอร์แรงโน้มถ่วงที่มีความแม่นยำ 0.1° ทำให้ชุดเซ็นเซอร์สมบูรณ์ อุปกรณ์นี้ใช้พลังงานจากเซลล์ AA ซึ่งใช้งานได้ 8 ชั่วโมง ระบบสามารถทำงานในโหมดของการแก้ไขการตกของเชลล์และการรายงานข้อมูลเกี่ยวกับเป้าหมาย สำหรับการส่งออกข้อมูลและภาพ มีขั้วต่อ RS232/422 ระบบ Sophie UF ยังให้บริการกับกองทัพอังกฤษภายใต้ชื่อ SSARF (Surveillance System and Range Finder)
เปลี่ยนจากง่ายไปซับซ้อน มาเน้นที่อุปกรณ์ Sophie MF กัน ประกอบด้วยตัวสร้างภาพความร้อนขนาด 8-12 µm ที่ระบายความร้อนด้วยช่องมองภาพกว้าง 8°x6° และช่องมองภาพแคบ 3.2°x2.4° และซูมดิจิตอล x2 มีตัวเลือกช่องสีวันพร้อมมุมมอง 3.7°x2.8° พร้อมด้วยตัวชี้เลเซอร์ที่มีความยาวคลื่น 839 นาโนเมตร ระบบ Sophie MF ยังมีเครื่องวัดระยะด้วยเลเซอร์ 10 กม. เครื่องรับ GPS ในตัว ขั้วต่อสำหรับเชื่อมต่อกับเครื่องรับ GPS ภายนอก และเข็มทิศแม่เหล็กที่มีความแม่นยำ 0.5° ในมุมแอซิมัท และในระดับความสูง 0.2° Sophie MF มีน้ำหนัก 3.5 กก. และทำงานบนชุดแบตเตอรี่นานกว่าสี่ชั่วโมง
Sophie XF เกือบจะเหมือนกับรุ่น MF เลย โดยความแตกต่างหลักอยู่ที่เซ็นเซอร์ภาพความร้อน ซึ่งทำงานในช่วงคลื่นกลาง (3-5 ไมครอน) IR ของสเปกตรัมและมีความกว้าง 15°x11.2° และ มุมมองภาพแคบ 2.5°x1.9° กำลังขยายแบบออปติคัล x6 และกำลังขยายแบบอิเล็กทรอนิกส์ x2 เอาต์พุตแบบอะนาล็อกและ HDMI มีให้สำหรับเอาต์พุตข้อมูลวิดีโอ เนื่องจาก Sophie XF สามารถจัดเก็บภาพถ่ายได้มากถึง 1,000 ภาพหรือวิดีโอสูงสุด 2 GB นอกจากนี้ยังมีพอร์ต RS 422 และ USB รุ่น XF มีขนาดและน้ำหนักเท่ากันกับรุ่น MF แม้ว่าชุดแบตเตอรี่จะใช้งานได้นานกว่าหกหรือเจ็ดชั่วโมง
บริษัท Instro Precision สัญชาติอังกฤษ ซึ่งเชี่ยวชาญด้าน goniometers และหัวพาโนรามา ได้พัฒนาระบบการลาดตระเวนแบบแยกส่วนและการกำหนดเป้าหมาย MG-TAS (Modular Gyro Target Acquisition System) โดยอิงจากไจโรสโคป ซึ่งช่วยให้สามารถระบุขั้วที่แท้จริงได้อย่างแม่นยำสูง ความแม่นยำน้อยกว่า 1 ล้าน (ไม่ได้รับผลกระทบจากการรบกวนของแม่เหล็ก) และโกนิโอมิเตอร์แบบดิจิตอลให้ความแม่นยำ 9 มม. ขึ้นอยู่กับสนามแม่เหล็ก ระบบยังมีขาตั้งกล้องน้ำหนักเบาและคอมพิวเตอร์พกพาที่ทนทานพร้อมชุดเครื่องมือกำหนดเป้าหมายครบชุดสำหรับการคำนวณข้อมูลเป้าหมาย อินเทอร์เฟซช่วยให้คุณติดตั้งเซ็นเซอร์การกำหนดเป้าหมายได้หนึ่งหรือสองตัว

Vectronix ได้พัฒนาระบบลาดตระเวนและกำหนดเป้าหมายของ Sterna ที่ไม่ใช่แม่เหล็กแบบเบาซึ่งมีระยะ 4 ถึง 6 กิโลเมตร (ติดตั้งบน Sagem Jim-LR ในภาพ)

การเพิ่มล่าสุดในตระกูลอุปกรณ์กำหนดเป้าหมายคือรุ่น Vectronix Moskito 77 ซึ่งมีแสงกลางวันสองช่องและช่องถ่ายภาพความร้อนหนึ่งช่อง

อุปกรณ์ Sophie XF จาก Thales ช่วยให้คุณกำหนดพิกัดของเป้าหมายได้ และสำหรับการมองเห็นตอนกลางคืนจะมีเซ็นเซอร์ที่ทำงานในช่วงกลางอินฟราเรดของสเปกตรัม

ระบบ Airbus DS Nestor พร้อมเมทริกซ์การถ่ายภาพความร้อนที่ระบายความร้อนด้วยความเย็นและน้ำหนัก 4.5 กก. ได้รับการพัฒนาสำหรับกองทหารราบบนภูเขาของเยอรมัน มันให้บริการกับหลายกองทัพ
Airbus DS Optronics นำเสนออุปกรณ์สอดแนม Nestor และ TLS-40 สองเครื่อง การเฝ้าระวัง และการกำหนดเป้าหมาย ซึ่งทั้งสองเครื่องผลิตในแอฟริกาใต้ อุปกรณ์ Nestor ซึ่งเริ่มผลิตในปี 2547-2548 ได้รับการพัฒนาสำหรับหน่วยปืนไรเฟิลภูเขาของเยอรมัน ระบบกล้องสองตาที่มีน้ำหนัก 4.5 กก. ประกอบด้วยช่องสัญญาณวันที่มีกำลังขยาย x7 และมุมมองภาพ 6.5 ° โดยเพิ่มเส้นใยเรติเคิล 5 มม. รวมถึงช่องถ่ายภาพความร้อนที่ใช้เมทริกซ์ระบายความร้อนด้วยขนาด 640x512 พิกเซลพร้อมช่องสองช่อง มุมมองแคบ 2.8°x2.3° และกว้าง (11.4°x9.1°) ระยะทางไปยังเป้าหมายวัดโดยเครื่องค้นหาระยะด้วยเลเซอร์ Class 1M ที่มีระยะ 20 กม. และความแม่นยำ ± 5 เมตร และแสงแฟลชที่ปรับได้ (ความถี่การทำซ้ำของพัลส์) ในระยะ ทิศทางและระดับความสูงของเป้าหมายนั้นมาจากเข็มทิศแม่เหล็กดิจิตอลที่มีความแม่นยำ ±1° ในมุมแอซิมัท และ ±0.5° ในระดับความสูง ในขณะที่มุมเงยที่วัดได้คือ +45° Nestor มีตัวรับสัญญาณ GPS L1 C/A 12 ช่องสัญญาณในตัว (ความละเอียดแบบหยาบ) และยังสามารถเชื่อมต่อโมดูล GPS ภายนอกได้อีกด้วย มีเอาต์พุตวิดีโอ CCIR-PAL อุปกรณ์นี้ใช้พลังงานจากแบตเตอรี่ลิเธียมไอออน แต่สามารถเชื่อมต่อกับแหล่งจ่ายไฟ DC ภายนอกที่ 10-32 โวลต์ได้ กล้องถ่ายภาพความร้อนแบบระบายความร้อนจะเพิ่มมวลของระบบ แต่ในขณะเดียวกันก็เพิ่มความสามารถในการมองเห็นตอนกลางคืนด้วย ระบบนี้ให้บริการกับกองทัพยุโรปหลายแห่ง รวมถึง Bundeswehr กองกำลังชายแดนของยุโรปหลายแห่ง และผู้ซื้อที่ไม่มีชื่อจากตะวันออกกลางและตะวันออกไกล บริษัทคาดว่าจะมีสัญญาขนาดใหญ่หลายฉบับสำหรับระบบหลายร้อยระบบในปี 2558 แต่ไม่มีการระบุชื่อลูกค้าใหม่ที่นั่น
โดยใช้ประสบการณ์ที่ได้รับจากการสร้างระบบ Nestor Airbus DS Optronics ได้พัฒนาระบบ Opus-H ที่เบากว่าพร้อมช่องถ่ายภาพความร้อนที่ไม่มีการระบายความร้อน เริ่มส่งมอบในปี 2550 มีช่องแสงกลางวันเหมือนกัน ในขณะที่อาร์เรย์ไมโครโบลเมตริกขนาด 640x480 ให้มุมมองภาพ 8.1°x6.1° และความสามารถในการบันทึกภาพในรูปแบบ jpg ส่วนประกอบอื่นๆ ยังคงเหมือนเดิม ซึ่งรวมถึงเครื่องวัดระยะด้วยเลเซอร์โมโนพัลส์ ซึ่งไม่เพียงแต่ขยายช่วงการวัดโดยไม่จำเป็นต้องใช้ระบบป้องกันภาพสั่นไหวของขาตั้งกล้องเท่านั้น แต่ยังตรวจจับและแสดงเป้าหมายได้สูงสุดสามเป้าหมายในทุกช่วง ตัวเชื่อมต่ออนุกรม USB 2.0, RS232 และ RS422 นั้นยังคงมาจากรุ่นก่อนหน้า แปดองค์ประกอบ AA ให้แหล่งจ่ายไฟ Opus-H มีน้ำหนักน้อยกว่า Nestor ประมาณหนึ่งกิโลกรัมและมีขนาดเล็กกว่าที่ 300x215x110 มม. เมื่อเทียบกับ 360x250x155 มม. ผู้ซื้อระบบ Opus-H จากโครงสร้างทางทหารและกึ่งทหารไม่ได้รับการเปิดเผย


ระบบ Airbus DS Optronics Opus-H
เนื่องจากความต้องการระบบกำหนดเป้าหมายน้ำหนักเบาและต้นทุนต่ำที่เพิ่มขึ้น Airbus DS Optronics (Pty) ได้พัฒนาชุดอุปกรณ์ TLS 40 ที่มีน้ำหนักน้อยกว่า 2 กก. พร้อมแบตเตอรี่ มีสามรุ่นให้เลือก: TLS 40 พร้อมแสงแดดเท่านั้น, TLS 40i พร้อมการปรับปรุงภาพ และ TLS 40IR พร้อมเซ็นเซอร์ภาพความร้อนที่ไม่มีการระบายความร้อน เครื่องวัดระยะด้วยเลเซอร์และ GPS ของพวกเขาเหมือนกับ Nestor เข็มทิศแม่เหล็กดิจิตอลทำงานในช่วงมุมแนวตั้ง ±45°, มุมลาดเอียง ±30° และให้ความแม่นยำในแนวราบ ±10 mil และ ±4 mil ช่องแสงกลางวันแบบสองตาที่มีเส้นเล็งเดียวกับในอุปกรณ์ Nestor มีกำลังขยาย x7 และมุมมองภาพ 7° โดยทั่วไปในสองรุ่นก่อนหน้า ตัวแปรการปรับปรุงภาพ TLS 40i มีช่องมองข้างเดียวตามหลอด Photonis XR5 พร้อมกำลังขยาย x7 และมุมมองภาพ 6° รุ่น TLS 40 และ TLS 40i มีความเหมือนกัน ลักษณะทางกายภาพ, ขนาด 187x173x91 มม. ด้วยน้ำหนักที่เท่ากันกับอีกสองรุ่น TLS 40IR จึงมีขนาดใหญ่กว่า 215x173x91 มม. มีช่องวันแบบตาข้างเดียวที่มีกำลังขยายเท่ากันและระยะการมองเห็นที่แคบกว่าเล็กน้อยที่ 6° อาร์เรย์ไมโครโบโลมิเตอร์ขนาด 640x312 ให้มุมมองภาพ 10.4°x8.3° พร้อมซูมดิจิตอล x2 ภาพจะแสดงบนจอแสดงผล OLED ขาวดำ รุ่น TLS 40 ทั้งหมดสามารถเลือกติดตั้งกล้องเวลากลางวัน 0.89°x0.75° สำหรับถ่ายภาพในรูปแบบ jpg และเครื่องบันทึกเสียงสำหรับบันทึกความคิดเห็นในรูปแบบ WAV ที่ 10 วินาทีต่อภาพ ทั้งสามรุ่นใช้พลังงานจากแบตเตอรี่ CR123 สามก้อนหรือจากแหล่งจ่ายไฟภายนอก 6-15 โวลต์ มีขั้วต่ออนุกรม USB 1.0, RS232, RS422 และ RS485, เอาต์พุตวิดีโอ PAL และ NTSC และยังสามารถติดตั้งเครื่องรับ GPS ภายนอกได้อีกด้วย ซีรีส์ TLS 40 ได้เข้าสู่บริการกับลูกค้าที่ไม่ระบุชื่อแล้ว รวมถึงลูกค้าชาวแอฟริกันด้วย

Nyxus Bird Gyro แตกต่างจากรุ่นก่อนของ Nyxus Bird ด้วยไจโรสโคปที่แท้จริง ซึ่งช่วยเพิ่มความแม่นยำในการกำหนดตำแหน่งของเป้าหมายในระยะทางไกล
บริษัท Jenoptik สัญชาติเยอรมันได้พัฒนาระบบการลาดตระเวน เฝ้าระวัง และกำหนดเป้าหมายในตอนกลางคืนของ Nyxus Bird ซึ่งมีให้ใช้งานในเวอร์ชันกลางและระยะไกล ความแตกต่างอยู่ที่ช่องสัญญาณภาพความร้อน ซึ่งในรุ่นช่วงกลางจะติดตั้งเลนส์ที่มีระยะการมองเห็น 11°x8° ช่วงการตรวจจับ การรับรู้ และการระบุเป้าหมายของ NATO มาตรฐานคือ 5, 2 และ 1 กม. ตามลำดับ ตัวแปรระยะไกลที่มีระยะการมองเห็น 7°x5° ให้ระยะการมองเห็นที่ไกลกว่า 7, 2.8 และ 1.4 กม. ตามลำดับ ขนาดเมทริกซ์สำหรับทั้งสองตัวเลือกคือ 640x480 พิกเซล ช่องมองภาพในเวลากลางวันของทั้งสองรุ่นมีมุมมองภาพ 6.75° และกำลังขยาย x7 เครื่องวัดระยะด้วยเลเซอร์ Class 1 มีระยะปกติ 3.5 กม. เข็มทิศแม่เหล็กดิจิตอลให้ความแม่นยำ 0.5° ในแนวราบในส่วน 360° และในระดับความสูง 0.2° ในส่วน 65° Nyxus Bird มีโหมดการวัดหลายแบบและสามารถจัดเก็บภาพอินฟราเรดได้มากถึง 2,000 ภาพ อย่างไรก็ตาม ด้วย GPS ในตัว สามารถเชื่อมต่อกับระบบ PLGR/DAGR เพื่อปรับปรุงความแม่นยำเพิ่มเติม สำหรับการถ่ายโอนภาพถ่ายและวิดีโอ มีขั้วต่อ USB 2.0 บลูทูธไร้สายเป็นอุปกรณ์เสริม ด้วยแบตเตอรีลิเธียม 3 โวลต์ น้ำหนักตัวเครื่อง 1.6 กก. ไม่มียางรองตา ยาว 180 มม. กว้าง 150 มม. และสูง 70 มม. นก Nyxus เป็นส่วนหนึ่งของโครงการปรับปรุง IdZ-ES ของกองทัพเยอรมัน การเพิ่มคอมพิวเตอร์ยุทธวิธี Micro Pointer พร้อมระบบข้อมูลทางภูมิศาสตร์แบบบูรณาการช่วยเพิ่มความสามารถในการกำหนดเป้าหมายได้อย่างมาก ไมโครพอยน์เตอร์ใช้พลังงานจากแหล่งจ่ายไฟภายในและภายนอก มีขั้วต่อ RS232, RS422, RS485 และ USB และขั้วต่ออีเทอร์เน็ตที่เป็นอุปกรณ์เสริม คอมพิวเตอร์ขนาดเล็กเครื่องนี้ (191x85x81 มม.) มีน้ำหนักเพียง 0.8 กก. อีกระบบที่เป็นทางเลือกคือไจโรสโคปแบบ True-pole ที่ไม่ใช่แม่เหล็ก ซึ่งให้ทิศทางที่แม่นยำมากและตำแหน่งเป้าหมายที่แม่นยำในทุกระยะทางที่ไกลเป็นพิเศษ หัวไจโรที่มีขั้วต่อเดียวกันกับไมโครพอยน์เตอร์สามารถเชื่อมต่อกับระบบ GPS PLGR/DAGR ภายนอกได้ ชิ้นเลนส์ CR123A สี่ชิ้นให้ทิศทาง 50 ทิศทางและการวัด 500 ครั้ง หัวหนัก 2.9 กก. และทั้งระบบพร้อมขาตั้ง 4.5 กก.
Millog บริษัทสัญชาติฟินแลนด์ได้พัฒนาระบบกำหนดเป้าหมายแบบแมนนวลของ Lisa ซึ่งรวมถึงตัวสร้างภาพความร้อนที่ไม่มีการระบายความร้อนและช่องสัญญาณออปติคัลที่มีระยะการตรวจจับ การรับรู้ และการระบุตัวรถที่ 4.8 กม. 1.35 กม. และ 1 กม. ตามลำดับ ระบบมีน้ำหนัก 2.4 กก. พร้อมแบตเตอรี่ที่ให้เวลาการทำงาน 10 ชั่วโมง หลังจากได้รับสัญญาในเดือนพฤษภาคม 2557 ระบบเริ่มเข้าประจำการกับกองทัพฟินแลนด์
พัฒนาขึ้นเมื่อหลายปีก่อนสำหรับโปรแกรมปรับปรุงทหารกองทัพอิตาลี Soldato Futuro โดย Selex-ES อุปกรณ์ลาดตระเวนและอุปกรณ์กำหนดเป้าหมาย Linx แบบใช้มือถือทั้งกลางวันและกลางคืนได้รับการปรับปรุงและขณะนี้มีเมทริกซ์ขนาด 640x480 ที่ไม่มีการระบายความร้อน ช่องถ่ายภาพความร้อนมีมุมมองภาพ 10°x7.5° พร้อมกำลังขยายแบบออปติคัล x2.8 และกำลังขยายแบบอิเล็กทรอนิกส์ x2 และ x4 ช่องวันเป็นกล้องสีที่มีกำลังขยายสองแบบ (x3.65 และ x11.75 พร้อมมุมมองที่สอดคล้องกัน 8.6°x6.5° และ 2.7°x2.2°) เส้นเล็งอิเล็กทรอนิกส์ที่ตั้งโปรแกรมได้ถูกสร้างขึ้นในจอแสดงผล VGA สี การวัดระยะสามารถทำได้สูงสุด 3 กม. โดยกำหนดตำแหน่งโดยใช้เครื่องรับ GPS ในตัว ขณะที่เข็มทิศแม่เหล็กดิจิตอลให้ข้อมูลทิศทาง รูปภาพจะถูกส่งออกผ่าน USB คาดว่าจะมีการพัฒนาเครื่องมือ Linx เพิ่มเติมในปี 2558 ด้วยการเปิดตัวเซ็นเซอร์ระบายความร้อนขนาดเล็กและคุณสมบัติใหม่
ในอิสราเอล กองทัพกำลังพยายามเพิ่มความสามารถในการยิงความร่วมมือ ด้วยเหตุนี้ แต่ละกองพันจะได้รับมอบหมายให้ประสานงานการโจมตีทางอากาศและกลุ่มสนับสนุนการยิงภาคพื้นดิน ปัจจุบันกองพันได้รับมอบหมายให้เจ้าหน้าที่ประสานงานปืนใหญ่หนึ่งคน อุตสาหกรรมระดับชาติกำลังทำงานเพื่อจัดหาเครื่องมือสำหรับงานนี้

อุปกรณ์ Lisa ของ บริษัท Millog ของฟินแลนด์นั้นติดตั้งระบบถ่ายภาพความร้อนและช่องแสงกลางวันที่ไม่มีการระบายความร้อน ด้วยมวลเพียง 2.4 กก. มีระยะการตรวจจับเพียงไม่ถึง 5 กม.

อุปกรณ์ Coral-CR ที่มีช่องถ่ายภาพความร้อนแบบระบายความร้อนเป็นส่วนหนึ่งของระบบการกำหนดเป้าหมายของบริษัท Elbit ของอิสราเอล
Elbit Systems มีบทบาทอย่างมากทั้งในอิสราเอลและสหรัฐอเมริกา อุปกรณ์สังเกตการณ์และลาดตระเวน Coral-CR มีเครื่องตรวจจับอินเดียมแอนติโมไนด์ความยาวคลื่นปานกลางที่ระบายความร้อนด้วยความเย็น 640x512 พร้อมช่องมองภาพออปติคอลตั้งแต่ 25°x20° ถึง 12.5°x10° และกำลังขยายแบบดิจิตอล x4 กล้อง CCD ขาวดำที่มีขอบเขตการมองเห็นตั้งแต่ 2.5°x1.9° ถึง 10°x7.5° ทำงานในบริเวณสเปกตรัมที่มองเห็นได้และใกล้กับอินฟราเรด ภาพจะแสดงบนจอ OLED สีความละเอียดสูงผ่านเลนส์กล้องสองตาที่ปรับได้ เครื่องวัดระยะด้วยเลเซอร์ Class 1 ที่ปลอดภัยต่อดวงตา, GPS ในตัว และเข็มทิศแม่เหล็กดิจิตอลที่มีความแม่นยำ 0.7° ในแนวราบและระดับความสูงทำให้ชุดเซ็นเซอร์สมบูรณ์ พิกัดเป้าหมายจะคำนวณตามเวลาจริงและสามารถส่งไปยังอุปกรณ์ภายนอกได้ อุปกรณ์สามารถจัดเก็บภาพได้มากถึง 40 ภาพ มีเอาต์พุตวิดีโอ CCIR หรือ RS170 Coral-CR มีความยาว 281 มม. กว้าง 248 มม. สูง 95 มม. และหนัก 3.4 กก. รวมแบตเตอรี่ ELI-2800E แบบชาร์จซ้ำได้ อุปกรณ์นี้ให้บริการกับประเทศ NATO หลายแห่ง (ในอเมริกาภายใต้ชื่อ Emerald-Nav)
เครื่องสร้างภาพความร้อนของ Mars ที่ไม่มีการระบายความร้อนนั้นเบากว่าและถูกกว่า โดยอิงจากเครื่องตรวจจับวานาเดียมออกไซด์ขนาด 384x288 นอกจากช่องถ่ายภาพความร้อนที่มีมุมมองภาพ 6°x4.5° และ 18°x13.5° แล้ว ยังมีกล้องถ่ายภาพกลางวันแบบสีในตัวพร้อมมุมมองภาพ 3°x2.5° และ 12°x10° , เครื่องค้นหาระยะด้วยเลเซอร์, เครื่องรับ GPS และเข็มทิศแม่เหล็ก เครื่องมือ Mars มีความยาว 200 มม. กว้าง 180 มม. และสูง 90 มม. และมีน้ำหนักเพียง 2 กก. พร้อมแบตเตอรี่
Ctrl เข้า
สังเกต osh s bku เน้นข้อความแล้วคลิก Ctrl+Enter
เครื่องวัดระยะควอนตัม
4.1 หลักการทำงานของเครื่องวัดระยะควอนตัม
หลักการทำงานของเครื่องวัดระยะควอนตัมขึ้นอยู่กับการวัดเวลาที่ผ่านของพัลส์แสง (สัญญาณ) ไปยังเป้าหมายและย้อนกลับ
การกำหนดพิกัดเชิงขั้วของจุด
การรักษาเป้าหมายที่เป็นศูนย์ (การสร้างเกณฑ์มาตรฐาน);
ศึกษาพื้นที่.

ข้าว. 13. DAK-2M ในตำแหน่งการต่อสู้
1- ตัวรับส่งสัญญาณ; 2- แท่นวัดมุม (UIP); 3- ขาตั้งกล้อง; 4- สายเคเบิล;
5- แบตเตอรี่ 21NKBN-3.5.
4.2.2. ลักษณะการทำงานพื้นฐาน DAK-2M
|
№№ |
ชื่อลักษณะ |
ตัวชี้วัด |
|
1 |
2 |
3 |
|
1 |
ช่วงและการวัด M: ขั้นต่ำ; ขีดสุด; สูงถึงเป้าหมายที่มีขนาดเชิงมุม ≥2′ |
8000 |
|
2 |
ข้อผิดพลาดในการวัดสูงสุด m ไม่มาก |
10 |
|
3 |
โหมดการทำงาน: จำนวนช่วงการวัดในชุด; ความถี่ในการวัด แบ่งระหว่างชุดของการวัด นาที; เวลาความพร้อมสำหรับการวัดระยะทางหลังจากเปิดเครื่อง วินาที ไม่มีอีกต่อไป เวลาที่ใช้ในโหมดความพร้อมสำหรับการวัดช่วงหลังจากกดปุ่ม START ขั้นต่ำ ไม่มากอีกต่อไป |
1 การวัดใน 5-7 วินาที 30 1 |
|
4 |
จำนวนการวัด (พัลส์ 0 โดยไม่ต้องชาร์จแบตเตอรี่ไม่น้อยกว่า |
300 |
|
5 |
ช่วงมุมชี้: |
± 4-50 |
|
6 |
ความแม่นยำในการวัดมุม กระแสตรง |
±0-01 |
|
7 |
ลักษณะทางแสง: เพิ่มขึ้นครั้ง; มุมมององศา; การส่องกล้อง, มม. |
6 |
|
8 |
อาหาร: แรงดันไฟฟ้าของแบตเตอรี่มาตรฐาน 21NKBN-3.5, v; แรงดันไฟฟ้าของแบตเตอรี่ที่ไม่ได้มาตรฐาน V; แรงดันไฟฟ้าของเครือข่ายออนบอร์ด V (เมื่อรวมแบตเตอรี่ที่มีแรงดันไฟฟ้า 22-29 V ไว้ในบัฟเฟอร์ ในกรณีนี้ ความผันผวนของแรงดันไฟฟ้าและการกระเพื่อมไม่ควรเกิน± 0.9 V) |
22-29 |
|
9 |
เครื่องวัดระยะน้ำหนัก: ในตำแหน่งต่อสู้โดยไม่มีกล่องเก็บของและแบตเตอรี่สำรอง กก. ในตำแหน่งที่เก็บไว้ (กำหนดน้ำหนัก), kg |
|
|
10 |
การคำนวณ, pers. |
2 |
4.2.3. ชุด (องค์ประกอบ) DAK-2M(รูปที่ 13)
เครื่องรับส่งสัญญาณ
แท่นวัดมุม (UIP)
ขาตั้งกล้อง
เคเบิ้ล.
แบตเตอรี่แบบชาร์จได้ 21NKBN-3.5
อะไหล่ชุดเดียว.
กล่องซ้อน.
ชุดเอกสารทางเทคนิค (แบบฟอร์ม TO และ IE)
อุปกรณ์ของส่วนประกอบของ DAK-2M
ตัวรับส่งสัญญาณ- ออกแบบมาสำหรับการลาดตระเวนทางสายตา (ภาพ) การวัดมุมแนวตั้ง การสร้างพัลส์การตรวจวัดแสง การรับและการลงทะเบียนการตรวจสอบและการสะท้อนจากพัลส์แสงของวัตถุในพื้นที่ (เป้าหมาย) แปลงเป็นพัลส์แรงดันไฟฟ้า สร้างพัลส์เพื่อเริ่มและหยุดช่วงเวลา เมตร (IVI).
ก) บล็อกหลักและโหนดของตัวรับส่งสัญญาณคือ:
เครื่องกำเนิดควอนตัมออปติคัล (OQG);
อุปกรณ์ตรวจจับแสง (FPU);
เครื่องขยายเสียง FPU (UFPU);
เปิดตัวบล็อก;
เครื่องวัดช่วงเวลา (IVI);
ตัวแปลงกระแสตรง (DCC);
หน่วยจุดระเบิด (BP);
ตัวแปลงกระแสตรง (PPN);
หน่วยควบคุม (BU);
บล็อกของตัวเก็บประจุ (BC);
ผู้จับกุม;
ศีรษะ;
กล้องสองตา;
กลไกการนับมุมแนวตั้ง
WGC ออกแบบมาเพื่อสร้างพัลส์รังสีที่มีทิศทางแคบและมีประสิทธิภาพ พื้นฐานทางกายภาพของการกระทำด้วยเลเซอร์คือการขยายแสงโดยการกระตุ้นการปล่อยแสง ในการทำเช่นนี้ เลเซอร์ใช้องค์ประกอบแอคทีฟและระบบสูบน้ำแบบออปติคัล
FPU ออกแบบมาเพื่อรับพัลส์ที่สะท้อนจากเป้าหมาย (พัลส์แสงสะท้อน) การประมวลผลและการขยายสัญญาณ เพื่อขยายสัญญาณ FPU มีเครื่องขยายสัญญาณตรวจจับแสงเบื้องต้น (UPFPU)
UFPUได้รับการออกแบบมาเพื่อขยายและประมวลผลพัลส์ที่มาจาก UPFPU ตลอดจนสร้างพัลส์หยุดสำหรับ IVI
BZ ได้รับการออกแบบมาเพื่อสร้างทริกเกอร์พัลส์ของ TIE และ FPA และหน่วงเวลาพัลส์เริ่มต้นของ TIE ที่สัมพันธ์กับพัลส์การแผ่รังสีเลเซอร์ในช่วงเวลาที่จำเป็นสำหรับการผ่านของพัลส์หยุดผ่าน UPFPU และ FPA
IVI ออกแบบมาเพื่อวัดช่วงเวลาระหว่างด้านหน้าของทริกเกอร์และพัลส์หยุดหนึ่งในสาม แปลงเป็นค่าตัวเลขของช่วงเป็นเมตรและระบุช่วงไปยังเป้าหมาย ตลอดจนระบุจำนวนเป้าหมายในช่วงการแผ่รังสี
TTX IV:
ช่วงของช่วงการวัด - 30 - 97500 m;
ความละเอียดตาม D - ไม่ต่ำกว่า 3 ม.
สามารถตั้งค่าต่ำสุดของช่วงที่วัดได้:
1050 ม. ± 75 ม.
2025 ม. ± 75 ม.
3000m±75m
IVI วัดช่วงถึงหนึ่งในสามเป้าหมายภายในช่วงของช่วงที่วัดได้ตามตัวเลือกของผู้ปฏิบัติงาน
PPT มีไว้สำหรับบล็อกของตัวเก็บประจุปั๊มและตัวเก็บประจุของหน่วยจ่ายไฟรวมถึงการจ่ายแรงดันไฟฟ้าที่เสถียรไปยังหน่วยควบคุม
BP ได้รับการออกแบบเพื่อสร้างพัลส์ไฟฟ้าแรงสูงที่ทำให้ช่องว่างการคายประจุของหลอดปั๊มแบบพัลซิ่งแตกตัวเป็นไอออน
PPN ได้รับการออกแบบมาเพื่อส่งแรงดันไฟฟ้าที่เสถียรไปยัง UPFPU, UFPU, BZ และทำให้ความเร็วในการหมุนของมอเตอร์ไฟฟ้าของชัตเตอร์ออปโตกลไกมีเสถียรภาพ
BOO ออกแบบมาเพื่อควบคุมการทำงานของหน่วยและหน่วยของตัวค้นหาระยะในลำดับที่กำหนดและควบคุมระดับแรงดันไฟฟ้าของแหล่งพลังงาน
BC ออกแบบมาเพื่อเก็บค่าใช้จ่าย
เครื่องจ่ายไฟ ออกแบบมาเพื่อขจัดประจุออกจากตัวเก็บประจุโดยการลัดวงจรไปยังตัวรับส่งสัญญาณ
ศีรษะ ออกแบบมาเพื่อรองรับกระจกมองข้าง ที่ด้านบนของหัวมีช่องสำหรับติดตั้งเสาเล็ง ติดเลนส์ฮูดเพื่อป้องกันกระจกศีรษะ
กล้องสองตา เป็นส่วนหนึ่งของเส้นเล็งและออกแบบมาเพื่อสังเกตภูมิประเทศ เล็งไปที่เป้าหมาย ตลอดจนอ่านตัวบ่งชี้ของตัวบ่งชี้ระยะ ตัวนับเป้าหมาย ระบุความพร้อมของเครื่องวัดระยะสำหรับการวัดระยะและสถานะของ แบตเตอรี่.
กลไกอ้างอิงมุมแนวตั้ง
มีไว้สำหรับการนับและบ่งชี้มุมแนวตั้งที่วัดได้
b) โครงร่างออปติคัลของตัวรับส่งสัญญาณ(รูปที่ 14)
ประกอบด้วย: - ช่องส่งสัญญาณ;
ช่องสัญญาณออปติคัลของเครื่องรับและเรติเคิลบางส่วนเกิดขึ้นพร้อมกัน (มีวัตถุประสงค์ร่วมกันและกระจกไดโครอิก)
ช่องส่งสัญญาณ ออกแบบมาเพื่อสร้างพัลส์เอกรงค์ที่มีประสิทธิภาพในระยะเวลาสั้น ๆ และความแตกต่างเชิงมุมเล็ก ๆ ของลำแสงและส่งไปยังทิศทางของเป้าหมาย
องค์ประกอบของมัน: - OGK (กระจก, ไฟแฟลช, แท่งองค์ประกอบแอคทีฟ, รีเฟลกเตอร์, ปริซึม);
ระบบยืดไสลด์ของกาลิเลโอ - เพื่อลดความแตกต่างเชิงมุมของรังสี

 ช่องรับสัญญาณ
ออกแบบมาเพื่อรับชีพจรรังสีที่สะท้อนจากเป้าหมายและสร้างระดับพลังงานแสงที่ต้องการบนโฟโตไดโอด FPU องค์ประกอบ: - เลนส์; - กระจกไดโครอิก
ช่องรับสัญญาณ
ออกแบบมาเพื่อรับชีพจรรังสีที่สะท้อนจากเป้าหมายและสร้างระดับพลังงานแสงที่ต้องการบนโฟโตไดโอด FPU องค์ประกอบ: - เลนส์; - กระจกไดโครอิก
ข้าว. สิบสี่. โครงร่างออปติคัลของตัวรับส่งสัญญาณ
ซ้าย: 1- กล้องโทรทรรศน์; 2- กระจก; 3- องค์ประกอบที่ใช้งาน; 4- ตัวสะท้อนแสง; 5- ไฟแฟลช ISP-600; 6- ปริซึม; 7.8 - กระจกเงา; 9- ช่องมองภาพ.
ตัวเชื่อมต่อ "POWER";
ขั้วต่อ PSA (สำหรับเชื่อมต่ออุปกรณ์คำนวณ)
วาล์วเป่าแห้ง.
บนหัวของตัวรับส่งสัญญาณคือ:
วาล์วอบแห้ง;
ซ็อกเก็ตสำหรับเสาเล็ง
สวิตช์เป้าหมายออกแบบมาเพื่อวัดระยะทางไปยังเป้าหมายที่หนึ่งหรือสองหรือสามซึ่งอยู่ในช่วงการแผ่รังสี
สวิตช์ประตูออกแบบมาเพื่อกำหนดช่วงต่ำสุด 200, 400, 1000, 2000, 3000 ให้ใกล้กว่าที่การวัดช่วงเป็นไปไม่ได้ ช่วงต่ำสุดที่ระบุสอดคล้องกับตำแหน่งของสวิตช์ "STROBING":
400 ม. - "0.4"
1,000 ม. - "1"
2000 ม. - "2"
3000 ม. - "3"
เมื่อตำแหน่งสวิตช์ "STROBING" ถูกตั้งไว้ที่ตำแหน่ง "3" ความไวของเครื่องตรวจจับแสงต่อสัญญาณสะท้อน (พัลส์) จะเพิ่มขึ้น

ข้าว. สิบห้าตัวควบคุม DAK-2M
1 - ตลับอบแห้ง; ไฟส่องสว่างกริด 2 โหนด; ตัวกรองแสง 3 สวิตช์; วัตถุประสงค์ 4 สวิตช์; 5.13 วงเล็บ; 6-แผงควบคุม; การวัด 7 ปุ่ม; 8 ปุ่ม START; ความสว่าง 9 ปุ่ม; สวิตช์เปิด-ปิด 10 ตัว BACKLIGHT; สวิตช์เปิดปิด 11 ตัว POWER; การควบคุมพารามิเตอร์ 12 พิน ; สวิตช์ 14 สวิตช์; 15 ระดับ; 16-รีเฟล็กเตอร์; กลไกมาตราส่วน 17 สำหรับการอ่านมุมแนวตั้ง


ข้าว. 16.ตัวควบคุม DAK-2M
ซ้าย: 1 สาย; 2 ฟิวส์; แลนเทิร์น 3 ปลั๊ก; 4 แผงควบคุม; 5 วง; PSA 6 คอนเนคเตอร์; 7,11-แหวน; แหล่งจ่ายไฟ 8 ปลั๊ก; การสอบเทียบ 9 ปุ่ม; 10 ปุ่มตรวจสอบโวลต์
ขวา: 1-ซ็อกเก็ต; 2 หัว; 3.9-drying วาล์ว; 4 ตัว; 5 eyecup; 6 กล้องส่องทางไกล; คำแนะนำแนวตั้ง 7 ด้าม; 8 วงเล็บ
แท่นวัดมุม (UIP)
UIPออกแบบมาเพื่อติดตั้งและปรับระดับตัวรับส่งสัญญาณ โดยหมุนรอบแกนแนวตั้งและวัดมุมแนวนอนและทิศทาง
องค์ประกอบของ UIP(รูปที่ 17)
อุปกรณ์หนีบ;
อุปกรณ์;
ระดับบอล.
UIP ติดตั้งบนขาตั้งกล้องและยึดผ่านบูชเกลียวด้วยสกรูชุด

ข้าว. 17. แท่นวัดมุม DAK-2M.
ที่จับ 1 อันสำหรับฝังตัวหนอน 2 ระดับ; 3 มือจับ; 4 อุปกรณ์หนีบ; 5 ฐานพร้อมล้อ; 6 กลอง; 7 ด้ามจับของคำแนะนำที่แม่นยำ; 8 น็อต; 9 ขา; 10 ด้าม; แขนเสื้อ 11 เกลียว; 12 ฐาน; สกรู 13 ตัวยก
ขาตั้งกล้องออกแบบมาเพื่อติดตั้งตัวรับส่งสัญญาณเพื่อติดตั้งตัวรับส่งสัญญาณในตำแหน่งการทำงานที่ความสูงที่ต้องการ ขาตั้งกล้องประกอบด้วยโต๊ะ แท่งจับคู่สามอัน และขาพับสามขา แท่งเชื่อมต่อกันด้วยบานพับและอุปกรณ์หนีบซึ่งยึดขาที่หดได้ด้วยสกรู บานพับติดกับโต๊ะพร้อมแผ่นปิด
แบตเตอรี่ 21 NKBN-3.5ออกแบบมาเพื่อจ่ายไฟให้กับบล็อคเรนจ์ไฟร์ด้วยกระแสตรงผ่านสายเคเบิล
NK - ระบบแบตเตอรี่นิกเกิลแคดเมียม
B - ประเภทแบตเตอรี่ - ไม่มีแผง;
H - คุณสมบัติทางเทคโนโลยีของการผลิตเพลท - การแพร่กระจาย;
3.5 - ความจุของแบตเตอรี่เล็กน้อยในหน่วยแอมแปร์-ชั่วโมง
 - ปุ่ม "MEASUREMENT 1" และ "MEASUREMENT 2" - สำหรับวัดระยะทางไปยังเป้าหมายที่หนึ่งหรือที่สองซึ่งอยู่ในช่วงการแผ่รังสี
- ปุ่ม "MEASUREMENT 1" และ "MEASUREMENT 2" - สำหรับวัดระยะทางไปยังเป้าหมายที่หนึ่งหรือที่สองซึ่งอยู่ในช่วงการแผ่รังสี
 ข้าว. ยี่สิบ.การควบคุม LPR-1
ข้าว. ยี่สิบ.การควบคุม LPR-1
ด้านบน: 1-casing; 2 ด้าม; 3-ดัชนี; 4 ปุ่ม MEASUREMENT1 และ MEASUREMENT 2; 5 สาย; 6 แผง; สวิตช์เปิดปิด 7 ตัว LIGHT; 8 ช่องมองภาพสายตา; 9 สกรู; 10 ช่องมองภาพสายตา; 11 ส้อม; ฝาปิดช่องใส่แบตเตอรี่ 12 ก้อน; สวิตช์เปิดปิดสวิตช์ 13 ตัว
ด้านล่าง: 1 ตลับอบแห้ง; 2-rmen; 3 วงเล็บ; 4 ฝา
ที่ด้านหลังและด้านล่าง:
ตัวยึดสำหรับติดตั้งอุปกรณ์บนโครงยึด UID หรือบนโครงยึด - อะแดปเตอร์เมื่อติดตั้งอุปกรณ์บนเข็มทิศ
ตลับอบแห้ง
เลนส์ช่องมองภาพ;
เลนส์กล้องโทรทรรศน์
คอนเนคเตอร์พร้อมฝาปิดสำหรับต่อสายเคเบิลของปุ่มรีโมท


ข้าว. 21. ขอบเขตการมองเห็นของตัวบ่งชี้ LPR-1
ตัวบ่งชี้ 1 ช่วง; 2,5,6-จุดทศนิยม; ตัวบ่งชี้ความพร้อม 3 (สีเขียว); ไฟแสดงสถานะการคายประจุแบตเตอรี่ 4 ก้อน (สีแดง)
บันทึก . ในกรณีที่ไม่มีชีพจรสะท้อน ศูนย์ (00000) จะแสดงเป็นตัวเลขทั้งหมดของตัวบ่งชี้ช่วง ในกรณีที่ไม่มีชีพจรที่ตรวจวัดค่าศูนย์จะแสดงเป็นตัวเลขทั้งหมดของตัวบ่งชี้ช่วงและจุดทศนิยมจะแสดงในหลักที่สาม (รูปที่ 21. ตำแหน่ง 5)
หากมีหลายเป้าหมายในเป้าหมายการแผ่รังสี (ในช่วงแบ่งตารางโกนิโอเมตริก) ระหว่างการวัด จุดทศนิยมจะสว่างขึ้นในตัวเลขลำดับต่ำของตัวบ่งชี้ช่วง (รูปที่ 21 ตำแหน่ง 2)
หากเป็นไปไม่ได้ที่จะขจัดสัญญาณรบกวนจากเกราะที่อยู่นอกเหนือการแตกหักของกริด goniometric และในกรณีที่ไม่มีการสังเกตการรบกวน และจุดทศนิยมในหลักต่ำ (ขวา) ของตัวบ่งชี้ช่วงจะสว่างขึ้น ให้เล็งเครื่องวัดระยะไปที่เป้าหมาย เพื่อให้เป้าหมายคาบเกี่ยวกัน เป็นไปได้ พื้นที่ขนาดใหญ่การแตกของกริดโกนิโอเมตริก วัดช่วง จากนั้นตั้งค่าปุ่มจำกัดช่วงต่ำสุดเป็นค่าช่วงที่เกินค่าที่วัดได้ 50-100 เมตร แล้ววัดช่วงอีกครั้ง ทำซ้ำขั้นตอนเหล่านี้จนกว่าจุดทศนิยมในหลักที่สำคัญที่สุดจะหายไป
เมื่อเลขศูนย์แสดงในตัวเลขทั้งหมดของตัวบ่งชี้ช่วงและจุดทศนิยมติดสว่างในหลักที่สำคัญที่สุด (ซ้าย) (รูปที่.21. ตำแหน่ง 6) ของตัวบ่งชี้ จำเป็นต้องลดช่วงการวัดต่ำสุดโดยเปลี่ยนค่าต่ำสุด ปุ่มจำกัดช่วงจนกว่าจะได้ผลลัพธ์การวัดที่เชื่อถือได้
2. เครื่องวัดมุม
(รูปที่ 22.).
ออกแบบมาสำหรับการติดตั้ง rangefinder โดยเล็งไปที่ rangefinder และวัดมุมแนวนอน แนวตั้ง และทิศทาง

19
สู่รายการโปรด รายการโปรดจากรายการโปรด 8
เพื่อนร่วมงานที่รัก เนื่องจากฮีโร่หลัก “เป็นเจ้าหน้าที่ปืนใหญ่ ผู้รับใช้ที่เชื่อฟังของคุณต้องเข้าใจเล็กน้อยเกี่ยวกับปัญหาการควบคุมการยิงในช่วงเวลาไม่นานก่อนสงครามโลกครั้งที่หนึ่งจะเริ่มต้นขึ้น อย่างที่ฉันสงสัย คำถามกลับกลายเป็นว่า f-ski ซับซ้อน แต่ฉันก็ยังรวบรวมข้อมูลบางอย่างได้ เนื้อหานี้ไม่ได้อ้างว่าสมบูรณ์และครอบคลุม แต่อย่างใด เป็นเพียงความพยายามที่จะรวบรวมข้อเท็จจริงและการคาดเดาทั้งหมดที่ฉันมีตอนนี้
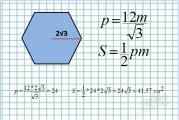
ลองใช้ "นิ้ว" เพื่อทำความเข้าใจคุณสมบัติของปืนใหญ่ ในการจะเล็งปืนไปที่เป้าหมาย คุณต้องตั้งค่าให้ถูกต้อง (มุมชี้แนวตั้ง) และระยะเล็งด้านหลัง (มุมชี้แนวนอน) โดยพื้นฐานแล้ว การติดตั้งกล้องเล็งที่ถูกต้องและกล้องมองหลังนั้นขึ้นอยู่กับศาสตร์แห่งศิลปะปืนใหญ่ อย่างไรก็ตาม พูดง่ายแต่ทำยาก
กรณีที่ง่ายที่สุดคือเมื่อปืนของเราหยุดนิ่งและยืนอยู่บนพื้นราบ และเราจำเป็นต้องยิงเป้าหมายที่อยู่กับที่ ในกรณีนี้ ดูเหมือนว่าจะเพียงพอแล้วที่จะเล็งปืนเพื่อให้ลำกล้องปืนมองตรงไปยังเป้าหมาย (และเราจะมีสายตาด้านหลังที่ถูกต้อง) และค้นหาระยะทางที่แน่นอนไปยังเป้าหมาย จากนั้นโดยใช้ตารางปืนใหญ่ เราสามารถคำนวณมุมยก (สายตา) ให้กับปืนและบูมได้! ไปให้ถึงเป้าหมายกันเถอะ
แน่นอน นี่ไม่ใช่กรณี - หากเป้าหมายอยู่ไกลพอ คุณจะต้องแก้ไขลม ความชื้นในอากาศ การสึกหรอของปืน อุณหภูมิดินปืน ฯลฯ ฯลฯ - และแม้หลังจากทั้งหมดนี้ หากเป้าหมายไม่ใหญ่เกินไป คุณจะต้องควักมันออกจากปืนใหญ่อย่างเหมาะสม เนื่องจากการเบี่ยงเบนเล็กน้อยในรูปร่างและน้ำหนักของขีปนาวุธ ตลอดจนน้ำหนักและคุณภาพของประจุ จะยังคงนำไปสู่การแพร่กระจายของการโจมตีที่รู้จักกันดี (ellipse scattering) แต่ถ้าเรายิงกระสุนออกไปตามจำนวนที่กำหนด สุดท้ายตามกฎของสถิติแล้ว เราจะยิงเข้าเป้าแน่นอน
แต่ตอนนี้เราจะเอาปัญหาการแก้ไขออกไป และพิจารณาอาวุธและเป้าหมายว่าเป็นม้าทรงกลมในสุญญากาศ สมมติว่าการยิงบนพื้นผิวที่เรียบเสมอกันโดยมีความชื้นเท่ากันเสมอไม่ใช่ลมพัด ปืนทำมาจากวัสดุที่ไม่เกิดการเผาไหม้ในหลักการ ฯลฯ เป็นต้น ในกรณีนี้ เมื่อทำการยิงจากปืนที่อยู่กับที่ไปยังเป้าหมายที่อยู่นิ่ง ก็เพียงพอแล้วที่จะทราบระยะห่างของเป้าหมาย ซึ่งจะทำให้เรามีมุมการเล็งแนวตั้ง (สายตา) และทิศทางไปยังเป้าหมาย (สายตา)
แต่ถ้าเป้าหมายหรืออาวุธไม่อยู่กับที่ล่ะ? เช่น ในกองทัพเรือเป็นอย่างไร? ปืนตั้งอยู่บนเรือรบที่เคลื่อนที่ด้วยความเร็วระดับหนึ่ง เป้าหมายที่น่าขยะแขยงของเขายังไม่หยุดนิ่งมันสามารถไปได้ทุกมุมแน่นอนของเรา และด้วยความเร็วที่เข้ามาในหัวกัปตันของเธอเท่านั้น แล้วไง?
เนื่องจากศัตรูกำลังเคลื่อนที่ในอวกาศและคำนึงถึงความจริงที่ว่าเราไม่ได้ยิงจากเทอร์โบเลเซอร์ซึ่งโจมตีเป้าหมายทันที แต่จากปืนซึ่งกระสุนปืนต้องใช้เวลาพอสมควรในการไปถึงเป้าหมายเราจึงต้องใช้ ตะกั่วเช่น ยิงไม่ใช่ที่ที่เรือรบศัตรูอยู่ในขณะที่ยิง แต่มันจะอยู่ที่ไหนใน 20–30 วินาที ตามเวลาที่กระสุนปืนของเรามาถึง
ดูเหมือนว่าจะง่ายเช่นกัน - มาดูแผนภาพกัน

เรือของเราอยู่ที่จุด O เรือศัตรูอยู่ที่จุด A ถ้าในขณะที่จุด O เรือของเรายิงใส่ศัตรูจากปืนใหญ่ จากนั้นในขณะที่ขีปนาวุธกำลังบิน เรือศัตรูจะเคลื่อนที่ไปยังจุด B ดังนั้น ในระหว่างการบินของโพรเจกไทล์ สิ่งต่อไปนี้จะเปลี่ยนไป:
- ระยะทางไปยังเรือรบเป้าหมาย (เดิมคือ OA จะกลายเป็น OB);
- แบริ่งไปยังเป้าหมาย (มีมุม S แต่จะกลายเป็นมุม D)
ดังนั้นเพื่อกำหนดการแก้ไขสายตาก็เพียงพอที่จะทราบความแตกต่างระหว่างความยาวของเซ็กเมนต์ OA และ OB นั่นคือขนาดของการเปลี่ยนแปลงระยะทาง (ต่อไปนี้ - VIR) และเพื่อกำหนดการแก้ไขสายตาด้านหลัง ก็เพียงพอที่จะทราบความแตกต่างระหว่างมุม S และ D นั่นคือ มูลค่าของการเปลี่ยนแปลงแบริ่ง
- ระยะทางไปยังเรือเป้าหมาย (OA);
- แบริ่งเป้าหมาย (มุม S);
- หลักสูตรเป้าหมาย;
- ความเร็วเป้าหมาย
ตอนนี้ เรามาพิจารณาว่าข้อมูลที่จำเป็นในการคำนวณ VIR และ VIP ได้มาอย่างไร
1. ระยะทางไปยังเรือรบเป้าหมาย - แน่นอน ตามเครื่องวัดระยะ และดียิ่งขึ้นไปอีก - เครื่องวัดระยะหลายตัว อย่างน้อยสามตัว จากนั้นค่าเบี่ยงเบนมากที่สุดสามารถละทิ้งได้ และค่าเฉลี่ยเลขคณิตสามารถนำมาจากอีกสองค่าได้ การระบุระยะทางโดยใช้เครื่องวัดระยะหลายตัวนั้นมีประสิทธิภาพมากกว่าอย่างเห็นได้ชัด
2. การแบกของเป้าหมาย (มุมของหัวเรื่องถ้าคุณต้องการ) - ด้วยความแม่นยำของ "เพดานครึ่งนิ้ว" ถูกกำหนดโดย goniometer ใด ๆ แต่สำหรับการวัดที่แม่นยำยิ่งขึ้นควรมีอุปกรณ์เล็ง - อุปกรณ์ที่มี ออปติกคุณภาพสูง สามารถ (รวมถึง) กำหนดเป้าหมายมุมหัวเรื่องได้อย่างแม่นยำมาก สำหรับการเล็งที่มุ่งเป้าไปที่ศูนย์กลาง ตำแหน่งของเรือรบเป้าหมายถูกกำหนดด้วยความผิดพลาด 1-2 ดิวิชั่นของสายตาด้านหลังของปืนอัตตาจร (เช่น ระยะทาง 1-2 ในพัน ที่ระยะ 90 kbt ตำแหน่ง ของเรือถูกกำหนดด้วยความแม่นยำ 30 เมตร)
3. หลักสูตรเป้าหมาย สำหรับสิ่งนี้ การคำนวณทางคณิตศาสตร์และกล้องส่องทางไกลปืนใหญ่พิเศษพร้อมการแบ่งแยกนั้นมีความจำเป็นอยู่แล้ว มันทำอย่างนี้ - ก่อนอื่น จำเป็นต้องระบุเรือรบเป้าหมาย จำความยาวของมัน วัดระยะทางให้มัน แปลงความยาวของเรือรบเป็นจำนวนดิวิชั่นบนกล้องส่องทางไกลปืนใหญ่สำหรับระยะทางที่กำหนด เหล่านั้น. คำนวณ: "ซู่ ความยาวของเรือลำนี้คือ 150 เมตร สำหรับ 70 kbt เรือที่ยาว 150 เมตร ควรครอบครองกล้องส่องทางไกลปืนใหญ่ 7 แผนก" หลังจากนั้น ให้มองดูเรือผ่านกล้องส่องทางไกลปืนใหญ่ และพิจารณาว่าเรือลำนี้มีอยู่กี่ส่วน ตัวอย่างเช่น หากเรือใช้พื้นที่ 7 ช่อง แสดงว่าเรือหันเข้าหาเราทั้งด้าน และถ้ามันน้อยกว่านั้น (สมมุติว่า - 5 ดิวิชั่น) - นี่หมายความว่าเรือรบตั้งอยู่ตรงมุมหนึ่งกับเรา การคำนวณอีกครั้งไม่ยากเกินไป - หากเราทราบความยาวของเรือรบ (เช่น ด้านตรงข้ามมุมฉาก AB ในตัวอย่างคือ 7) และเรากำหนดความยาวของการฉายภาพด้วยความช่วยเหลือของกล้องส่องทางไกล (เช่น ขา AC ใน ตัวอย่างคือความยาว 5) จากนั้นการคำนวณมุม S เป็นเรื่องของชีวิต

สิ่งเดียวที่ฉันต้องการเพิ่มคือบทบาทของกล้องส่องทางไกลปืนใหญ่สามารถทำได้ในสายตาเดียวกัน
4. ความเร็วเป้าหมาย ตอนนี้มันยากขึ้น โดยหลักการแล้ว ความเร็วสามารถประมาณ "ด้วยตาเปล่า" (ด้วยความแม่นยำที่เหมาะสม) แต่แน่นอนว่าสามารถแม่นยำกว่าได้ - เมื่อทราบระยะห่างจากเป้าหมายและเส้นทาง คุณจะสังเกตเป้าหมายและกำหนดความเร็วการเคลื่อนที่เชิงมุมได้ - เช่น. การเปลี่ยนทิศทางไปยังเป้าหมายได้เร็วแค่ไหน นอกจากนี้ ระยะทางที่เรือเดินทางจะถูกกำหนด (อีกครั้ง ไม่มีอะไรซับซ้อนไปกว่าการพิจารณาสามเหลี่ยมมุมฉาก) และความเร็วของเรือ
อย่างไรก็ตาม ในที่นี้ใครๆ ก็ถามได้ว่าทำไม ตัวอย่างเช่น ทำไมเราถึงทำให้ทุกอย่างซับซ้อนนัก ถ้าเราสามารถวัดการเปลี่ยนแปลงใน VIP ได้ง่ายๆ โดยการสังเกตเรือรบเป้าหมายผ่านสายตา? แต่สิ่งนี้คือการเปลี่ยนแปลงใน VIP นั้นไม่เป็นเชิงเส้น ดังนั้นข้อมูลของการวัดปัจจุบันจึงล้าสมัยอย่างรวดเร็ว
คำถามต่อไปคือสิ่งที่เราต้องการจากระบบควบคุมอัคคีภัย (FCS)? แต่อะไร.
SLA ควรได้รับข้อมูลต่อไปนี้:
- ระยะทางไปยังเรือเป้าหมายศัตรูและแบกรับมัน
- หลักสูตรและความเร็วของเรือของตัวเอง
ในขณะเดียวกัน ข้อมูลต้องได้รับการปรับปรุงอย่างต่อเนื่องโดยเร็วที่สุด
- เส้นทางและความเร็วของเรือเป้าหมายศัตรู
- แปลงเส้นทาง/ความเร็วเป็นแบบจำลองการเคลื่อนที่ของเรือรบ (เจ้าของและศัตรู) ซึ่งคุณสามารถทำนายตำแหน่งของเรือรบได้
- ตะกั่วในการยิงโดยคำนึงถึง VIR, VIP และระยะเวลาบินของกระสุนปืน
- สายตาและสายตาหลังโดยคำนึงถึงตะกั่ว (คำนึงถึงการแก้ไขทุกประเภท (อุณหภูมิดินปืน ลม ความชื้น ฯลฯ))
FCS ต้องโอนสายตาและสายตาด้านหลังจากอุปกรณ์ให้ในหอประชุม (เสากลาง) ไปยัง ปืนใหญ่เพื่อให้การทำงานของพลปืนมีน้อย
SLA จะต้องทำให้แน่ใจว่าการยิงปืนใหญ่ที่เลือกโดยปืนใหญ่อาวุโสในเวลาที่เขาเลือก
อุปกรณ์ควบคุมการยิงปืนใหญ่ arr 1910 ของ N.K. Geisler & K

พวกเขาได้รับการติดตั้งบนเดรดนอตของรัสเซีย (ทั้งทะเลบอลติกและทะเลดำ) และรวมกลไกหลายอย่างเพื่อวัตถุประสงค์ต่างๆ อุปกรณ์ทั้งหมดสามารถแบ่งออกเป็น ให้ (ซึ่งข้อมูลถูกป้อน) และรับ (ซึ่งให้ข้อมูลบางส่วน) นอกจากนี้ยังมีอุปกรณ์เสริมมากมายที่รับประกันการทำงานของส่วนที่เหลือ แต่เราจะไม่พูดถึงพวกเขา เราจะแสดงรายการหลัก:
เครื่องมือสำหรับส่งสัญญาณการอ่านเรนจ์ไฟน
ผู้ให้ - ตั้งอยู่ในห้องโดยสารเรนจ์ไฟน พวกเขามีมาตราส่วนที่ให้คุณกำหนดระยะห่างจาก 30 ถึง 50 kbt ด้วยความแม่นยำครึ่งสาย จาก 50 ถึง 75 kbt - 1 สายเคเบิล และจาก 75 ถึง 150 kbt - 5 สายเคเบิล ผู้ดำเนินการกำหนดช่วงโดยใช้ตัวค้นหาช่วงแล้วให้ตั้งค่าที่เหมาะสมด้วยตนเอง
รีซีฟเวอร์ - ซึ่งอยู่ในคอนนิ่งทาวเวอร์และซีพียู มีปุ่มหมุนเดียวกับตัวให้ ทันทีที่ผู้ดำเนินการอุปกรณ์ให้ตั้งค่าบางอย่าง มันจะสะท้อนบนหน้าปัดของอุปกรณ์รับทันที
อุปกรณ์สำหรับส่งทิศทางของเป้าหมายและสัญญาณ

อุปกรณ์ที่ค่อนข้างตลกซึ่งมีหน้าที่ระบุเรือที่จะยิง (แต่ไม่ได้หมายถึงการแบกบนเรือลำนี้) และได้รับคำสั่งเกี่ยวกับประเภทของการโจมตี "shot / attack / zeroing / volley / quick fire"
อุปกรณ์ให้นั้นอยู่ในหอประชุม ส่วนรับอยู่ที่ปืน casemate แต่ละอัน และอีกอันสำหรับแต่ละหอคอย พวกเขาทำงานคล้ายกับเครื่องมือในการส่งสัญญาณการอ่านเรนจ์ไฟร์
อุปกรณ์ทั้งหมด (อุปกรณ์สำหรับส่งสัญญาณภาพแนวนอน)
นี่คือจุดเริ่มต้นของความคลุมเครือ ทุกอย่างชัดเจนมากขึ้นหรือน้อยลงด้วยอุปกรณ์ให้ - พวกมันตั้งอยู่ในหอประชุมและมีมาตราส่วน 140 แผนกที่สอดคล้องกับแผนกของสถานที่ท่องเที่ยวปืน (เช่น 1 แผนก - 1/1000 ของระยะทาง) อุปกรณ์รับถูกวาง ตรงที่สายตาของปืน ระบบทำงานในลักษณะนี้ - ผู้ดำเนินการอุปกรณ์ให้ในหอประชุม (CPU) ตั้งค่าที่แน่นอนบนมาตราส่วน ดังนั้นค่าเดียวกันจึงแสดงบนอุปกรณ์รับหลังจากนั้นงานของมือปืนคือการหมุนกลไกการเล็งจนกว่าการเล็งแนวนอนของปืนจะใกล้เคียงกับลูกศรบนอุปกรณ์ แล้ว - ดูเหมือนว่าจะเป็น openwork ปืนถูกชี้อย่างถูกต้อง
มีข้อสงสัยว่าอุปกรณ์ไม่ได้ให้มุมของสายตาแนวนอน แต่มีเพียงการแก้ไขตะกั่วเท่านั้น ไม่ได้รับการยืนยัน
อุปกรณ์สำหรับถ่ายโอนความสูงของสายตา
หน่วยที่ซับซ้อนที่สุด
อุปกรณ์ให้ตั้งอยู่ในคอนนิ่งทาวเวอร์ (CPU) อุปกรณ์ป้อนข้อมูลระยะทางไปยังเป้าหมายและ VIR ด้วยตนเอง (จำนวนการเปลี่ยนแปลงระยะทางหากใครลืม) หลังจากนั้นอุปกรณ์นี้เริ่มคลิกบางสิ่งที่นั่นและให้ระยะทางกับเป้าหมายในเวลาปัจจุบัน เหล่านั้น. อุปกรณ์เพิ่ม / ลบ VIR อย่างอิสระจากระยะทางและส่งข้อมูลนี้ไปยังอุปกรณ์รับ
อุปกรณ์รับรวมทั้งอุปกรณ์รับทั้งหมดถูกติดตั้งไว้ที่สายตาของปืน แต่มันไม่ใช่ระยะทางที่ปรากฏบนพวกเขา แต่เป็นการมองเห็น เหล่านั้น. อุปกรณ์สำหรับส่งความสูงของการมองเห็นได้แปลงระยะทางเป็นมุมของการมองเห็นอย่างอิสระและมอบให้กับปืน กระบวนการทำงานอย่างต่อเนื่อง กล่าวคือ ในแต่ละช่วงเวลา ลูกศรของอุปกรณ์รับจะแสดงภาพจริงในขณะนั้น ยิ่งไปกว่านั้น มันเป็นไปได้ที่จะทำการแก้ไขในอุปกรณ์รับของระบบนี้ (โดยการเชื่อมต่อสิ่งผิดปกติหลายอย่าง) เหล่านั้น. ตัวอย่างเช่น ถ้าปืนถูกยิงอย่างหนักและระยะการยิงของมันลดลง พูด 3 kbt เมื่อเทียบกับปืนใหม่ มันก็เพียงพอแล้วที่จะติดตั้งสิ่งแปลกปลอมที่เหมาะสม - ตอนนี้ ถึงมุมของการมองเห็นที่ส่งมาจากอุปกรณ์ที่ให้ สำหรับปืนนี้โดยเฉพาะ มุมถูกเพิ่มเข้ามาเพื่อชดเชยกับอันเดอร์ชูตสามสาย นี่คือการแก้ไขส่วนบุคคลสำหรับปืนแต่ละกระบอก
บนหลักการเดียวกันนั้น เป็นไปได้ที่จะแนะนำการปรับอุณหภูมิของดินปืน (เหมือนกับอุณหภูมิในห้องใต้ดิน) รวมถึงการปรับประเภทของประจุ / กระสุนปืน "การฝึก / การต่อสู้ / ภาคปฏิบัติ"
แต่นั่นไม่ใช่ทั้งหมด
ความจริงก็คือความแม่นยำของการติดตั้งสายตาคือ "บวกหรือลบป้ายรถรางที่ปรับให้ลาดเอียงของดาวเหนือ" มันง่ายที่จะทำผิดพลาดทั้งกับระยะของเป้าหมายและขนาดของ VIR ความเห็นถากถางดูถูกพิเศษยังประกอบด้วยความจริงที่ว่าช่วงจาก rangefinders มักมีความล่าช้าเสมอ ความจริงก็คือเครื่องวัดระยะเป็นตัวกำหนดระยะห่างจากวัตถุ ณ เวลาที่การวัดเริ่มขึ้น แต่เพื่อกำหนดช่วงนี้ เขาต้องดำเนินการหลายอย่าง รวมถึงการ "รวมภาพ" เป็นต้น ทั้งหมดนี้ใช้เวลาพอสมควร ต้องใช้เวลามากขึ้นในการรายงานบางช่วงและตั้งค่าบนอุปกรณ์ให้เพื่อส่งการอ่านเรนจ์ไฟ ตามแหล่งข้อมูลต่างๆ เจ้าหน้าที่ปืนใหญ่อาวุโสเห็นอุปกรณ์รับสัญญาณสำหรับส่งสัญญาณการอ่านเรนจ์ไฟร์ ไม่ใช่ระยะปัจจุบัน แต่เป็นช่วงที่เกือบจะหนึ่งนาทีที่แล้ว
ดังนั้นอุปกรณ์ให้สำหรับส่งความสูงของสายตาทำให้ปืนใหญ่อาวุโสมีโอกาสมากที่สุดสำหรับสิ่งนี้ เมื่อใดก็ได้ระหว่างการทำงานของอุปกรณ์ คุณสามารถป้อนการแก้ไขด้วยตนเองสำหรับช่วงหรือขนาดของ VIR ได้ด้วยตนเอง และอุปกรณ์จะคำนวณต่อไปตั้งแต่ช่วงเวลาที่ป้อนการแก้ไข โดยคำนึงถึงแล้ว เป็นไปได้ที่จะปิดอุปกรณ์ทั้งหมดและตั้งค่าการมองเห็นด้วยตนเอง และยังสามารถตั้งค่าเป็น "กระตุก" - เช่น ตัวอย่างเช่น ถ้าอุปกรณ์ของเราแสดงการมองเห็น 15 องศา เราก็สามารถยิงสามวอลเลย์ติดต่อกันได้ - ที่ 14, ที่ 15 และที่ 16 องศา โดยไม่ต้องรอให้กระสุนตกลงมาและไม่มีการแนะนำช่วง / การแก้ไข VIR แต่ การตั้งค่าเริ่มต้นของเครื่องไม่สูญหาย
และในที่สุดก็
Howlers และโทร
อุปกรณ์ให้ตั้งอยู่ในหอประชุม (CPU) และฮาวเลอร์เอง - หนึ่งอันสำหรับปืนแต่ละกระบอก เมื่อผู้จัดการดับเพลิงต้องการยิงวอลเลย์ เขาจะปิดสนามแข่งที่เกี่ยวข้อง และพลปืนก็ยิงกระสุนใส่ปืน
น่าเสียดายที่มันเป็นไปไม่ได้อย่างยิ่งที่จะพูดถึง Geisler ของรุ่นปี 1910 ในฐานะ SLA ที่เต็มเปี่ยม ทำไม
- OMS ของ Geisler ไม่มีอุปกรณ์สำหรับกำหนดแบริ่งไปยังเป้าหมาย (ไม่มีสายตา)
- ไม่มีเครื่องมือใดที่สามารถคำนวณเส้นทางและความเร็วของเรือเป้าหมายได้ ดังนั้นเมื่อได้รับพิสัย (จากอุปกรณ์สำหรับส่งสัญญาณการอ่านเรนจ์ไฟร์) และกำหนดแบริ่งด้วยวิธีการชั่วคราว อย่างอื่นจะต้องคำนวณด้วยตนเอง
- นอกจากนี้ยังไม่มีเครื่องมือใดที่จะกำหนดเส้นทางและความเร็วของเรือของพวกเขาเอง - พวกเขาจะต้องได้รับโดย "วิธีการชั่วคราว" นั่นคือไม่รวมอยู่ในชุด Geisler;
- ไม่มีอุปกรณ์สำหรับการคำนวณ VIR และ VIP โดยอัตโนมัติ นั่นคือ เมื่อได้รับและคำนวณหลักสูตร / ความเร็วของเรือและเป้าหมายแล้ว จำเป็นต้องคำนวณทั้ง VIR และ VIP ด้วยตนเองอีกครั้ง
ดังนั้น แม้ว่าจะมีอุปกรณ์ขั้นสูงที่คำนวณความสูงของการมองเห็นโดยอัตโนมัติ แต่ OMS ของ Geisler ยังคงต้องการการคำนวณแบบแมนนวลจำนวนมาก - และนี่ก็ไม่ดี
SLA ของ Geisler ไม่ได้ยกเว้นและไม่สามารถยกเว้นการใช้ปืนเล็งโดยพลปืนได้ ความจริงก็คือความสูงของการมองเห็นอัตโนมัติคำนวณการมองเห็น ... แน่นอนในขณะที่เรืออยู่บนกระดูกงูเท่ากัน และเรือสัมผัสประสบการณ์ทั้งการขว้างและหมุน และ SLA ของ Geisler ไม่ได้คำนึงถึงเลยและไม่ว่าในทางใด ดังนั้นจึงมีข้อสันนิษฐานคล้ายกับความจริงมากว่างานของมือปืนนั้นรวมถึงการ "บิด" ของรถกระบะซึ่งจะทำให้สามารถชดเชยการขว้างของเรือได้ เป็นที่ชัดเจนว่าจำเป็นต้อง "บิด" ตลอดเวลา แม้ว่าจะมีข้อสงสัยว่าปืน 305 มม. จะ "เสถียร" แบบแมนนวลได้ นอกจากนี้ ถ้าฉันพูดถูกว่า FCS ของ Geisler ไม่ได้ส่งมุมการเล็งในแนวนอน แต่มีเพียงผู้นำ จากนั้นมือปืนของปืนแต่ละกระบอกก็เล็งปืนของเขาไปในระนาบแนวนอนอย่างอิสระและเป็นผู้นำตามคำสั่งจากด้านบนเท่านั้น
SLA ของ Geisler อนุญาตให้ระดมยิง แต่ปืนใหญ่อาวุโสไม่สามารถยิงลูกพร้อมกันได้ - เขาทำได้ ให้สัญญาณเปิดไฟ, มันไม่เหมือนกัน. เหล่านั้น. ลองนึกภาพ - สี่หอคอยของ "เซวาสโทพอล" ในแต่ละมือปืน "บิด" สถานที่ท่องเที่ยวเพื่อชดเชยการทอย ทันใดนั้น - ฮาวเลอร์! ใครบางคนมีสายตาปกติ เขายิง และบางคนยังไม่ได้ทำให้เสีย เขาบิดมัน ยิงกระสุน ... และความแตกต่าง 2-3 วินาทีจะเพิ่มการกระจายตัวของกระสุนอย่างมาก ดังนั้น การให้สัญญาณไม่ได้หมายถึงการระดมยิงเพียงครั้งเดียว
แต่ MSA ของ Geisler ทำได้ดีมากกับการถ่ายโอนข้อมูลจากอุปกรณ์ให้ในหอประชุมไปยังเครื่องรับที่ปืน ไม่มีปัญหาใดๆ เลย และระบบกลับกลายเป็นว่าเชื่อถือได้และรวดเร็วมาก
กล่าวอีกนัยหนึ่งอุปกรณ์ Geisler ของรุ่นปี 1910 นั้นไม่ใช่ OMS มากนัก แต่เป็นวิธีการส่งข้อมูลจาก glavart ไปยังปืน (แม้ว่าการมีการคำนวณความสูงของสายตาโดยอัตโนมัติให้สิทธิ์ในแอตทริบิวต์ Geisler ถึง อสม.)
อุปกรณ์เล็งเห็นปรากฏใน MSA ของ Erickson ขณะที่เชื่อมต่อกับอุปกรณ์ไฟฟ้าเครื่องกลที่ให้มุมการเล็งในแนวนอน เห็นได้ชัดว่าการหมุนของสายตานำไปสู่การเคลื่อนที่ของลูกศรบนสายตาของปืน
มีพลปืนกลาง 2 คนใน MSA ของ Erickson หนึ่งในนั้นมีส่วนร่วมในการเล็งแนวนอนคนที่สอง - แนวตั้งและพวกเขา (ไม่ใช่พลปืน) ที่คำนึงถึงมุมทอย - มุมนี้ถูกวัดและเพิ่มอย่างต่อเนื่อง เล็งมุมบนกระดูกงูเท่ากัน ดังนั้นพลปืนจึงต้องบิดปืนเพื่อให้สายตาและสายตาด้านหลังสอดคล้องกับค่าของลูกศรบนภาพ มือปืนไม่จำเป็นต้องมองเข้าไปในกล้องเล็งอีกต่อไป
โดยทั่วไปแล้ว การพยายาม "รักษา" การขว้างด้วยการทำให้ปืนมีเสถียรภาพด้วยตนเองนั้นดูแปลก มันจะง่ายกว่ามากในการแก้ไขปัญหาโดยใช้หลักการที่แตกต่าง - อุปกรณ์ที่จะปิดวงจรและยิงกระสุนเมื่อเรืออยู่บนกระดูกงูเท่ากัน ในรัสเซียมีอุปกรณ์ควบคุมการทอยตามการทำงานของลูกตุ้ม แต่อนิจจา พวกเขามีข้อผิดพลาดพอสมควรและไม่สามารถใช้สำหรับการยิงปืนใหญ่ได้ พูดตามตรง ชาวเยอรมันมีอุปกรณ์ดังกล่าวหลังจาก Jutland เท่านั้นและ Erickson ยังคงให้ผลลัพธ์ที่ไม่เลวร้ายไปกว่า "การรักษาเสถียรภาพด้วยตนเอง"
การยิงวอลเลย์เป็นไปตามหลักการใหม่ - ตอนนี้เมื่อพลปืนในหอคอยพร้อมพวกเขากดแป้นเหยียบพิเศษและมือปืนอาวุโสปิดวงจรด้วยการเหยียบคันเร่งของตัวเองในหอประชุม (CPU) เป็นหอคอย พวกเราพร้อมแล้ว. เหล่านั้น. วอลเลย์กลายเป็นครั้งเดียวจริงๆ
Erickson มีอุปกรณ์สำหรับคำนวณ VIR และ VIP โดยอัตโนมัติหรือไม่ - ฉันไม่รู้ แต่สิ่งที่ทราบแน่ชัด - ตั้งแต่ปี พ.ศ. 2454-2455 OMS ของ Erickson ไม่ได้เตรียมตัวไว้อย่างน่าเศร้า กลไกการส่งสัญญาณจากอุปกรณ์ให้ไปยังผู้รับนั้นทำงานได้ไม่ดี กระบวนการนี้ใช้เวลานานกว่าใน OMS ของ Geisler แต่การไม่ตรงกันเกิดขึ้นอย่างต่อเนื่อง อุปกรณ์ควบคุมการม้วนตัวทำงานช้าเกินไป เพื่อให้สายตาและสายตาหลังของพลปืนตรงกลาง "ไม่ตาม" กับการกลิ้ง - โดยมีผลที่ตามมาสำหรับความแม่นยำของการยิง สิ่งที่ต้องทำ?
กองทัพเรือจักรวรรดิรัสเซียเดินตามเส้นทางที่ค่อนข้างเดิม ระบบ Geisler รุ่น 1910 ได้รับการติดตั้งบนเรือประจัญบานใหม่ล่าสุด และเนื่องจาก FCS ทั้งหมด มีเพียงอุปกรณ์คำนวณความสูงของสายตา เห็นได้ชัดว่าตัดสินใจไม่รอจนกว่าจะนึกถึง FCS ของ Erickson ที่จะไม่พยายามซื้อเรือลำใหม่ FCS (เช่น จากอังกฤษ) ทั้งหมด แต่เพื่อให้ได้มาหรือนึกถึงอุปกรณ์ที่หายไปและเพียงแค่เสริมระบบ Geisler เข้ากับอุปกรณ์เหล่านั้น
ลำดับที่น่าสนใจมอบให้โดย Mr. Serg บน Tsushima: http://tsushima.su/forums/viewtopic.php?id=6342&p=1
เมื่อวันที่ 11 มกราคม MTK ตัดสินใจติดตั้งระบบ Erickson ที่ Sevakh
12 พฤษภาคม Erickson ยังไม่พร้อม เซ็นสัญญากับ Geisler
เมื่อวันที่ 12 กันยายน ได้มีการลงนามในสัญญากับ Erickson เพื่อติดตั้งเครื่องมือเพิ่มเติม
13 กันยายน Erickson เสร็จสิ้นเครื่องมือ Pollen และ AVP Geisler
14 มกราคม การติดตั้งชุดเครื่องมือ Pollen บน PV
14 มิถุนายน การทดสอบอุปกรณ์ของ Pollen บน PV เสร็จสิ้น
ข้อสรุป 15 ธันวาคมของสัญญาสำหรับการพัฒนาและติดตั้งระบบทำความร้อนส่วนกลาง
ในฤดูใบไม้ร่วงที่ 16 การติดตั้งระบบทำความร้อนส่วนกลางเสร็จสมบูรณ์
ถ่าย 17g ด้วย CN
ด้วยเหตุนี้ SLA ของ "Sevastopol" ของเราจึงกลายเป็นส่วนผสมที่ลงตัว เครื่องคำนวณ VIR และ VIP จัดทำโดยเครื่องภาษาอังกฤษที่ซื้อจาก Pollan สถานที่ท่องเที่ยวอยู่ที่ Erickson เครื่องจักรสำหรับคำนวณความสูงของสายตาคือในตอนแรก Geisler จากนั้นจึงแทนที่ด้วย Erickson เพื่อตรวจสอบหลักสูตร ไจโรสโคปได้รับการติดตั้ง (แต่ไม่ใช่ความจริงที่ว่าในสงครามโลกครั้งที่หนึ่ง อาจจะในภายหลัง ...) โดยทั่วไป ราวปี 1916 เซวาสโทพอลของเราได้รับระบบการเล็งจากศูนย์กลางระดับเฟิร์สคลาสสำหรับช่วงเวลานั้น
แล้วเพื่อนที่สาบานของเราล่ะ?
ดูเหมือนว่าวิธีที่ดีที่สุดในการไปยังจุ๊ตคือกับชาวอังกฤษ ทีมงานจากเกาะได้คิดค้นสิ่งที่เรียกว่า "Dreyer Table" ซึ่งทำให้กระบวนการพัฒนาภาพแนวตั้งและแนวนอนเป็นไปอย่างอัตโนมัติมากที่สุด

อังกฤษต้องใช้แบริ่งและกำหนดระยะทางไปยังเป้าหมายด้วยตนเอง แต่เส้นทางและความเร็วของเรือรบข้าศึกถูกคำนวณโดยอัตโนมัติโดยอุปกรณ์ Dumaresque อีกครั้งที่ฉันเข้าใจผลลัพธ์ของการคำนวณเหล่านี้ถูกส่งไปยัง "ตาราง Dreyer" โดยอัตโนมัติซึ่งได้รับข้อมูลตามเส้นทาง / ความเร็วของตัวเองจากอะนาล็อกของมาตรวัดความเร็วและไจโรคอมพาสสร้างแบบจำลองการเคลื่อนที่ของเรือ คำนวณ VIR และ VIP ในประเทศของเราแม้หลังจากการปรากฏตัวของอุปกรณ์ Pollan ซึ่งคำนวณ VIR การถ่ายโอน VIR ไปยังเครื่องเพื่อคำนวณความสูงของสายตาก็เกิดขึ้นดังนี้ - ผู้ดำเนินการอ่านการอ่านของ Pollan แล้วป้อนลงในเครื่อง เพื่อคำนวณความสูงของสายตา กับอังกฤษทุกอย่างเกิดขึ้นโดยอัตโนมัติ
ฉันพยายามนำข้อมูลบน LMS มาไว้ในตารางเดียว นี่คือสิ่งที่เกิดขึ้น:

อนิจจาสำหรับฉัน - อาจเป็นตารางที่มีข้อผิดพลาดมากมาย ข้อมูลใน SLA ของเยอรมันมีความละเอียดอ่อนอย่างยิ่ง: http://navycollection.narod.ru/library/Haase/artillery.htm
และในภาษาอังกฤษ - ในภาษาอังกฤษซึ่งฉันไม่รู้: http://www.dreadnoughtproject.org/tfs/index.php/Dreyer_Fire_Control_Table
ชาวอังกฤษแก้ปัญหาด้วยการชดเชยการกลิ้งตามยาว / ตามขวางได้อย่างไร - ฉันไม่รู้ แต่ชาวเยอรมันไม่มีอุปกรณ์ชดเชยใด ๆ (ปรากฏขึ้นหลังจาก Jutland เท่านั้น)
โดยทั่วไปแล้ว ปรากฎว่า SLA ของเรือดำน้ำบอลติกยังด้อยกว่าอังกฤษ และอยู่ในระดับเดียวกับเยอรมันโดยประมาณ จริงด้วยข้อยกเว้นหนึ่งข้อ
ในเยอรมัน "Derflinger" มีเครื่องวัดระยะ 7 (ในคำ - SEVEN) และพวกเขาทั้งหมดวัดระยะทางไปยังศัตรู และค่าเฉลี่ยเข้าไปในเครื่องเพื่อคำนวณการมองเห็น ที่ "เซวาสโทพอล" ในประเทศในขั้นต้นมีเพียงเครื่องวัดระยะสองอัน (ยังมีเครื่องวัดระยะที่เรียกว่า Krylov แต่ไม่มีอะไรมากไปกว่าการปรับปรุงไมโครมิเตอร์ Lujol-Myakishev และไม่ได้ให้การวัดคุณภาพสูงในระยะทางไกล)
ในอีกด้านหนึ่ง ดูเหมือนว่าเครื่องหาระยะดังกล่าว (ซึ่งมีคุณภาพดีกว่าของอังกฤษมาก) ได้เพียงให้ชาวเยอรมันมองเห็นได้อย่างรวดเร็วใน Jutland แต่เป็นเช่นนั้นหรือ? "Derflinger" คนเดียวกันยิงจากวอลเลย์ที่ 6 เท่านั้นและโดยทั่วไปแล้วโดยบังเอิญ (ตามทฤษฎีแล้ววอลเลย์ที่หกควรจะบินผู้นำของ "Derflinger" Hase พยายามนำอังกฤษเข้าสู่ ส้อม อย่างไรก็ตาม ทำให้เขาประหลาดใจ มีปก ) "โกเบน" โดยทั่วไปยังไม่แสดงผลงานที่ยอดเยี่ยม แต่ต้องคำนึงว่าชาวเยอรมันยังคงยิงได้ดีกว่าอังกฤษมาก อาจมีข้อดีบางประการเกี่ยวกับ rangefinders ของเยอรมันในเรื่องนี้
แต่ฉันเชื่อว่าความแม่นยำที่ดีที่สุดของเรือรบเยอรมันนั้นไม่ได้เป็นผลมาจากความเหนือกว่าของอังกฤษในด้านวัสดุ แต่เป็นระบบที่แตกต่างไปจากเดิมอย่างสิ้นเชิงสำหรับการฝึกพลปืน
ที่นี่ฉันจะอนุญาตให้ตัวเองทำข้อความที่ตัดตอนมาจากหนังสือ Hector Charles Bywater และ Hubert Cecil Ferrabyปัญญาประหลาด. บันทึกความทรงจำของหน่วยสืบราชการลับของกองทัพเรือ ตำรวจลอนดอน 2474: http://militera.lib.ru/h/bywater_ferraby/index.html
ได้รับอิทธิพลจากพลเรือเอก Thomsen German กองทัพเรือเริ่มทดลองด้วยการยิงระยะไกลในปี พ.ศ. 2438... ...กองทัพเรือที่สร้างขึ้นใหม่สามารถอนุรักษ์นิยมน้อยกว่ากองทัพเรือที่มีขนบธรรมเนียมแบบเก่า ดังนั้นในประเทศเยอรมนี นวัตกรรมทั้งหมดที่สามารถเพิ่มพลังการต่อสู้ของกองทัพเรือได้รับการรับรองอย่างเป็นทางการล่วงหน้า ....
ชาวเยอรมันทำให้แน่ใจว่าการยิงในระยะไกลเป็นไปได้ในทางปฏิบัติทำให้ปืนข้างของพวกเขามีมุมเล็งที่ใหญ่ที่สุดเท่าที่จะเป็นไปได้ ...
... หากป้อมปืนของชาวเยอรมันแล้วในปี 1900 อนุญาตให้ปืนยกถังขึ้น 30 องศาจากนั้นบนเรืออังกฤษมุมสูงไม่เกิน 13.5 องศาซึ่งทำให้เรือเยอรมันได้เปรียบอย่างมาก หากสงครามได้ปะทุขึ้นในเวลานั้น กองเรือเยอรมันก็คงจะแซงหน้าเราในด้านความแม่นยำและระยะการยิงอย่างมาก ....
... ระบบควบคุมการยิงแบบรวมศูนย์ "ผู้อำนวยการดับเพลิง" ซึ่งติดตั้งตามที่ระบุไว้แล้วบนเรือของกองเรืออังกฤษชาวเยอรมันไม่ได้มีเวลาสักครู่หลังจากการรบแห่งจุ๊ต แต่ประสิทธิภาพของการยิงได้รับการยืนยัน โดยผลของการต่อสู้ครั้งนี้
แน่นอน ผลลัพธ์เหล่านี้เป็นผลจากการทำงานหนัก 20 ปี ต่อเนื่องและถี่ถ้วน ซึ่งโดยทั่วไปแล้วเป็นลักษณะเฉพาะของชาวเยอรมัน สำหรับทุก ๆ ร้อยปอนด์ที่เราจัดสรรในปีนั้นเพื่อการวิจัยด้านปืนใหญ่ เยอรมนีจัดสรรหนึ่งพัน ลองมาเพียงตัวอย่างเดียว เจ้าหน้าที่หน่วยสืบราชการลับได้เรียนรู้ในปี 1910 ว่าชาวเยอรมันจัดสรรกระสุนจำนวนมากสำหรับการฝึกมากกว่าที่เราทำสำหรับปืนลำกล้องใหญ่ - มากกว่าร้อยละ 80 การฝึกยิงจริงกับเรือเป้าหมายหุ้มเกราะเป็นการฝึกอย่างต่อเนื่องในหมู่ชาวเยอรมัน ในขณะที่กองทัพเรืออังกฤษนั้นหายากมากหรือแทบไม่ได้ทำเลย ....
... ในปี ค.ศ. 1910 มีการฝึกซ้อมที่สำคัญในทะเลบอลติกโดยใช้อุปกรณ์ Richtungsweiser ที่ติดตั้งบนเรือ Nassau และ Westfalen มีการแสดงให้เห็นเปอร์เซ็นต์ที่สูงของการโจมตีเป้าหมายที่เคลื่อนที่จากระยะทางไกลถึง 11,000 เมตร และหลังจากการปรับปรุงบางอย่าง ได้มีการจัดการทดสอบภาคปฏิบัติใหม่
แต่ในเดือนมีนาคม พ.ศ. 2454 ได้รับข้อมูลที่ถูกต้องและอธิบายได้มากมาย มันเกี่ยวข้องกับผลการฝึกยิงที่ดำเนินการโดยกองเรือรบเยอรมันที่มีปืน 280 มม. ที่เป้าหมายแบบลากจูงที่ระยะเฉลี่ย 11,500 เมตร โดยมีทะเลค่อนข้างหนักและมีทัศนวิสัยปานกลาง 8% ของกระสุนเข้าเป้า ผลลัพธ์นี้เหนือกว่าสิ่งที่เราได้รับการบอกกล่าวมาก่อนมาก ดังนั้นผู้เชี่ยวชาญจึงแสดงความสงสัย แต่หลักฐานค่อนข้างน่าเชื่อถือ
ค่อนข้างชัดเจนว่ามีการรณรงค์เพื่อทดสอบและเปรียบเทียบข้อดีของการกำหนดเป้าหมายและระบบคำแนะนำ หนึ่งในนั้นอยู่บนเรือประจัญบาน Alsace และอีกลำในรุ่นทดลองได้รับการติดตั้งบน Blucher สถานที่ยิงปืนอยู่ห่างจากหมู่เกาะแฟโรไปทางตะวันตกเฉียงใต้ 30 ไมล์ เป้าหมายคือเรือลาดตระเวนเบาซึ่งเป็นส่วนหนึ่งของแผนก เห็นได้ชัดว่าพวกเขาไม่ได้ยิงใส่เรือลาดตระเวนเอง อย่างที่เขาพูดกันในกองทัพเรืออังกฤษว่า "เป้าหมายที่ถูกเปลี่ยน" นั่นคือการเล็งไปที่เรือเป้าหมาย ในขณะที่ตัวปืนถูกเลื่อนไปที่มุมหนึ่งแล้วยิง การตรวจสอบนั้นง่ายมาก - หากเครื่องมือทำงานอย่างถูกต้อง กระสุนจะตกลงมาตามระยะทางที่คำนวณได้จากท้ายเรือเป้าหมาย
ข้อได้เปรียบหลักของวิธีนี้ซึ่งคิดค้นโดยชาวเยอรมันตามคำกล่าวของพวกเขาคือโดยไม่กระทบต่อความถูกต้องของผลลัพธ์ที่ได้รับ มันทำให้สามารถเปลี่ยนเป้าหมายทั่วไปในการยิงได้ ซึ่งเนื่องจากเครื่องยนต์และกลไกที่หนักหน่วง สามารถลากได้เฉพาะที่ความเร็วต่ำและโดยปกติในสภาพอากาศที่ดี
การประมาณการ "กะ" สามารถเรียกได้ว่าเป็นการประมาณในระดับหนึ่งเท่านั้น เพราะมันขาดข้อเท็จจริงขั้นสุดท้าย - รูในเป้าหมาย แต่ในทางกลับกัน และข้อมูลที่ได้รับนั้นแม่นยำเพียงพอสำหรับวัตถุประสงค์ในทางปฏิบัติทั้งหมด
ในระหว่างการทดลองครั้งแรก Alsace และ Blucher ยิงจากระยะ 10,000 เมตรไปยังเป้าหมายซึ่งมีเรือลาดตระเวนเบาเดินทางด้วยความเร็ว 14 ถึง 20 นอต
เงื่อนไขเหล่านี้รุนแรงผิดปกติสำหรับยุคนั้น และไม่น่าแปลกใจที่รายงานผลของการยิงเหล่านี้ทำให้เกิดการโต้เถียง และแม้แต่ความจริงของมันก็ถูกหักล้างโดยผู้เชี่ยวชาญชาวอังกฤษบางคนเกี่ยวกับ ปืนใหญ่นาวิกโยธิน. อย่างไรก็ตาม รายงานเหล่านี้เป็นความจริง และผลการทดสอบก็ประสบความสำเร็จอย่างไม่น่าเชื่อ
จาก 10,000 เมตร Alsace ติดอาวุธด้วยปืนใหญ่ 280 มม. รุ่นเก่า ยิงวอลเลย์สามปืนที่เป้าหมาย นั่นคือ ถ้าปืนไม่ได้ถูกเล็ง "ด้วยการกะ" กระสุนก็จะเข้าที่เป้าหมาย เรือประจัญบานจัดการได้ง่ายเช่นเดียวกันเมื่อยิงจากระยะไกล 12,000 เมตร
"Blucher" ติดอาวุธด้วยปืน 210 มม. ใหม่ 12 กระบอก เขายังจัดการเพื่อโจมตีเป้าหมายได้อย่างง่ายดาย กระสุนส่วนใหญ่ที่ยิงในบริเวณใกล้เคียงหรือตรงเข้าสู่เวคที่เรือลาดตระเวนเป้าหมายทิ้งไว้
วันที่สอง เพิ่มระยะทางเป็น 13,000 เมตร อากาศดีและมีคลื่นเล็กน้อยทำให้เรือสั่นสะเทือน แม้จะมีระยะทางเพิ่มขึ้น "Alsace" ก็ยิงได้ดีก่อนที่ "Blucher" เขาจะเกินความคาดหมายทั้งหมด
เคลื่อนที่ด้วยความเร็ว 21 นอต เรือลาดตระเวนหุ้มเกราะ "แยก" เรือเป้าหมาย เดินทางด้วยความเร็ว 18 นอต จากการยิงครั้งที่สาม ยิ่งไปกว่านั้น ตามการประมาณการของผู้เชี่ยวชาญที่อยู่บนเรือลาดตระเวนเป้าหมาย มันเป็นไปได้ที่จะระบุด้วยความมั่นใจในการโจมตีของกระสุนหนึ่งนัดหรือมากกว่าในแต่ละวอลเลย์ทั้งสิบเอ็ดที่ตามมา เมื่อพิจารณาจากขนาดลำกล้องที่ค่อนข้างเล็กของปืน ความเร็วสูงที่ "มือปืน" และเป้าหมาย และสภาพของท้องทะเล ผลของการยิงในเวลานั้นอาจเรียกได้ว่าเป็นปรากฏการณ์ รายละเอียดทั้งหมดเหล่านี้ และอื่นๆ อีกมากมาย มีอยู่ในรายงานที่ตัวแทนของเราส่งไปยังหน่วยสืบราชการลับ
เมื่อรายงานไปถึงกองทัพเรือ เจ้าหน้าที่รุ่นเก่าบางคนมองว่าเป็นความผิดพลาดหรือเท็จ ตัวแทนที่เขียนรายงานถูกเรียกตัวไปลอนดอนเพื่อหารือเกี่ยวกับเรื่องนี้ เขาได้รับแจ้งว่าข้อมูลเกี่ยวกับผลการทดสอบที่ระบุโดยเขาในรายงานนั้น “เป็นไปไม่ได้อย่างแน่นอน” ว่าไม่มีเรือลำเดียวที่จะสามารถโจมตีเป้าหมายที่กำลังเคลื่อนที่ในขณะเคลื่อนที่ในระยะทางมากกว่า 11,000 เมตรโดยทั่วไป ว่าทั้งหมดนี้เป็นนิยายหรือความผิดพลาด
โดยบังเอิญ ผลการยิงของเยอรมันกลายเป็นที่รู้จักเมื่อไม่กี่สัปดาห์ก่อนการทดสอบครั้งแรกโดยระบบควบคุมการยิงของกองทัพเรืออังกฤษของพลเรือเอกสก็อตต์ ซึ่งมีชื่อเล่นว่า "ผู้อำนวยการดับเพลิง" HMS Neptune เป็นเรือรบลำแรกที่ติดตั้งระบบนี้ เขาฝึกการยิงในเดือนมีนาคม พ.ศ. 2454 ด้วยผลลัพธ์ที่ยอดเยี่ยม แต่นักอนุรักษ์นิยมอย่างเป็นทางการทำให้การเปิดตัวอุปกรณ์ในเรือลำอื่นช้าลง ตำแหน่งนี้คงอยู่จนถึงเดือนพฤศจิกายน พ.ศ. 2455 เมื่อทำการทดสอบเปรียบเทียบระบบ Director บนเรือ Thunderer และระบบเก่าที่ติดตั้งบน Orion
เซอร์เพอร์ซีย์ สก็อตต์ บรรยายคำสอนด้วยถ้อยคำต่อไปนี้:
“ ระยะทาง 8200 เมตรเรือ“ มือปืน” เคลื่อนที่ด้วยความเร็ว 12 นอตเป้าหมายถูกลากด้วยความเร็วเท่ากัน เรือทั้งสองลำพร้อมกันเปิดฉากยิงทันทีหลังจากสัญญาณ ธันเดอร์เรอร์ยิงได้ดีมาก กลุ่มดาวนายพรานส่งเปลือกหอยไปทุกทิศทุกทาง สามนาทีต่อมา สัญญาณ "หยุดยิง!" และตรวจสอบเป้าหมาย ผลที่ได้คือ Thunderer ยิงได้มากกว่า Orion ถึง 6 ครั้ง
เท่าที่เราทราบ การยิงครั้งแรกในกองทัพเรืออังกฤษที่ระยะ 13,000 เมตรเกิดขึ้นในปี 1913 เมื่อเรือ "ดาวเนปจูน" ยิงไปที่เป้าหมายจากระยะไกลดังกล่าว
บรรดาผู้ที่ติดตามการพัฒนาเครื่องมือและเทคนิคการยิงปืนใหญ่ในเยอรมนีรู้ว่าเราควรคาดหวังอะไร และหากมีสิ่งใดที่กลายเป็นเรื่องเซอร์ไพรส์ก็เป็นเพียงความจริงที่ว่าใน Battle of Jutland นั้นอัตราส่วนของจำนวนกระสุนที่ยิงเข้าเป้าต่อ จำนวนทั้งหมดกระสุนที่ยิงไม่เกิน 3.5%
ฉันจะใช้เสรีภาพในการยืนยันว่าคุณภาพของการยิงของเยอรมันอยู่ในระบบการฝึกปืนใหญ่ซึ่งดีกว่าของอังกฤษมาก เป็นผลให้ชาวเยอรมันชดเชยความเหนือกว่าของอังกฤษใน LMS ด้วยความเป็นมืออาชีพ
หน่วยงานของรัฐบาลกลางเพื่อการศึกษา
สถาบันการศึกษาระดับอุดมศึกษาของรัฐ
สถาบันมอสโกวแห่งวิศวกรรมวิทยุอิเล็กทรอนิกส์และระบบอัตโนมัติ (มหาวิทยาลัยเทคนิค)
หลักสูตรการทำงาน
ตามระเบียบวินัย
"พื้นฐานทางกายภาพของการวัด"
กระทู้: Rangefinder
№ นักแสดงกลุ่มนักเรียน - ES-2-08
นามสกุลของ I. O. ของนักแสดง - Prusakov A. A.
นามสกุลและชื่อหัวหน้า - Rusanov K. E.
มอสโก 2010
บทนำ _______________________________________________________________________3
2. ประเภทของเครื่องวัดระยะ ______________________________________________5
3. เครื่องวัดระยะด้วยเลเซอร์ _____________________________________________6
3.1. พื้นฐานทางกายภาพของการวัดและหลักการทำงาน _________________8
3.2 คุณสมบัติการออกแบบและหลักการทำงาน ประเภทและการสมัคร ____12
4. เครื่องวัดระยะด้วยแสง __________________________________________ 19
4.1. ฐานทางกายภาพของการวัดและหลักการทำงาน ________________21
4.1.2 เครื่องวัดระยะเกลียวมุมคงที่ ____________________________ 23
4.1.3 การวัดระยะความชันด้วยเครื่องวัดระยะไส้หลอด __________25
4.2 ลักษณะการออกแบบและหลักการทำงาน ___________________________________27
5. บทสรุป _____________________________________________________________29
6. รายการบรรณานุกรม ______________________________________30
1. บทนำ
เครื่องวัดระยะ- อุปกรณ์ที่ออกแบบมาเพื่อกำหนดระยะห่างจากผู้สังเกตไปยังวัตถุ ใช้ใน geodesy สำหรับการโฟกัสในการถ่ายภาพ ในสายตาของอาวุธ ระบบทิ้งระเบิด ฯลฯ
มาตรวิทยา- สาขาการผลิตที่เกี่ยวข้องกับการวัดบนพื้นดิน เป็นส่วนสำคัญของงานก่อสร้าง ด้วยความช่วยเหลือของ geodesy โครงการของอาคารและโครงสร้างจะถูกถ่ายโอนจากกระดาษสู่ธรรมชาติด้วยความแม่นยำระดับมิลลิเมตร คำนวณปริมาณวัสดุ และตรวจสอบการปฏิบัติตามพารามิเตอร์ทางเรขาคณิตของโครงสร้าง นอกจากนี้ยังพบการใช้งานในการขุดเพื่อคำนวณการระเบิดและปริมาณหิน
งานหลักของมาตร:
ในบรรดางานมากมายของ geodesy เราสามารถแยกแยะ "งานระยะยาว" และ "งานสำหรับปีต่อ ๆ ไป" ได้
งานระยะยาว ได้แก่ :
การกำหนดรูปร่าง ขนาด และสนามโน้มถ่วงของโลก
การกระจายของระบบพิกัดเดียวไปยังอาณาเขตของรัฐที่แยกจากกัน ทวีป และทั้งโลกโดยรวม
ทำการวัดบนพื้นผิวโลก
การแสดงภาพพื้นที่ผิวดินบนแผนที่และแผนผังภูมิประเทศ
การศึกษาการเคลื่อนที่ของเปลือกโลกทั่วโลก
ปัจจุบันงานหลักสำหรับปีต่อ ๆ ไปในรัสเซียมีดังนี้:
การสร้างที่ดินของรัฐและท้องถิ่น: ที่ดิน, ป่าน้ำ, ในเมือง, ฯลฯ ;
การสนับสนุนภูมิประเทศและ geodetic สำหรับการกำหนดเขต (คำจำกัดความ) และการแบ่งเขต (การกำหนด) ของชายแดนรัฐของรัสเซีย
การพัฒนาและการนำมาตรฐานไปใช้ในด้านการทำแผนที่ดิจิทัล
การสร้างแผนที่ดิจิทัลและอิเล็กทรอนิกส์และคลังข้อมูล
การพัฒนาแนวคิดและโปรแกรมของรัฐสำหรับการเปลี่ยนไปใช้วิธีการดาวเทียมอย่างกว้างขวางสำหรับการกำหนดพิกัดอิสระ
การสร้าง Atlas ระดับชาติที่ครอบคลุมของรัสเซียและอื่น ๆ
ระยะเลเซอร์เป็นหนึ่งในพื้นที่แรก ๆ ของการประยุกต์ใช้เลเซอร์ในอุปกรณ์ทางทหารต่างประเทศ การทดลองครั้งแรกย้อนหลังไปถึงปี 1961 และตอนนี้เครื่องค้นหาระยะด้วยเลเซอร์ถูกใช้ทั้งในยุทโธปกรณ์ทางการทหารภาคพื้นดิน (ปืนใหญ่) และในการบิน (เครื่องค้นหาระยะ เครื่องวัดระยะสูง เครื่องกำหนดเป้าหมาย) และในกองทัพเรือ เทคนิคนี้ผ่าน การทดสอบการต่อสู้ในเวียดนามและตะวันออกกลาง ในปัจจุบัน กองทัพต่างๆ ของโลกได้นำเครื่องวัดระยะจำนวนหนึ่งมาใช้
ข้าว. 2 - เครื่องวัดระยะสายตาด้วยเลเซอร์ ใช้ครั้งแรกกับ T72A
2. ประเภทของเครื่องวัดระยะ
อุปกรณ์วัดระยะแบ่งออกเป็นแบบแอกทีฟและแบบพาสซีฟ:
เครื่องวัดระยะเสียง
เครื่องวัดระยะแสง
เครื่องวัดระยะด้วยเลเซอร์
เครื่องวัดระยะโดยใช้กล้องวัดระยะแบบพารัลแลกซ์แบบออปติคัล)
rangefinders ที่ใช้การจับคู่แบบวัตถุกับรูปแบบ
คล่องแคล่ว:
เฉยๆ:
หลักการทำงานของเครื่องวัดระยะแบบแอคทีฟคือการวัดเวลาที่ใช้สำหรับสัญญาณที่ส่งโดยเครื่องวัดระยะเพื่อเดินทางระยะทางไปยังวัตถุและย้อนกลับ ความเร็วของการแพร่กระจายสัญญาณ (ความเร็วของแสงหรือเสียง) เป็นที่ทราบกันดีอยู่แล้ว
การวัดระยะทางด้วยเครื่องวัดระยะแบบพาสซีฟนั้นพิจารณาจากการกำหนดความสูง h ของสามเหลี่ยมหน้าจั่ว ABC ตัวอย่างเช่น การใช้ด้านที่ทราบ AB = l (ฐาน) และมุมแหลมตรงข้าม b (มุมที่เรียกว่าพารัลแลกซ์) สำหรับมุมเล็ก b (แสดงเป็นเรเดียน)
ปริมาณหนึ่ง l หรือ b มักจะเป็นค่าคงที่ และอีกค่าหนึ่งเป็นตัวแปร (วัด) บนพื้นฐานนี้ rangefinders มีความโดดเด่นด้วย มุมคงที่และเรนจ์ไฟนเดอร์ที่มีฐานตายตัว
3. เครื่องวัดระยะด้วยเลเซอร์
เครื่องวัดระยะด้วยเลเซอร์ - อุปกรณ์สำหรับวัดระยะทางโดยใช้ลำแสงเลเซอร์
มีการใช้กันอย่างแพร่หลายในด้านวิศวกรรมมาตรวิทยา การสำรวจภูมิประเทศ การเดินเรือทางทหาร การวิจัยด้านอาหาร และการถ่ายภาพ
เครื่องวัดระยะด้วยเลเซอร์เป็นอุปกรณ์ที่ประกอบด้วยเครื่องตรวจจับรังสีเลเซอร์แบบพัลซิ่ง โดยการวัดเวลาที่ลำแสงใช้ในการเดินทางไปยังตัวสะท้อนแสงและด้านหลัง และเมื่อทราบค่าความเร็วของแสงแล้ว ก็สามารถคำนวณระยะห่างระหว่างเลเซอร์กับวัตถุสะท้อนแสงได้

รูปที่ 1 เครื่องวัดระยะด้วยเลเซอร์รุ่นใหม่
การแพร่กระจายคลื่นแม่เหล็กไฟฟ้าที่ความเร็วคงที่ทำให้สามารถกำหนดระยะห่างจากวัตถุได้ ดังนั้น ด้วยวิธีการวัดระยะแบบพัลส์ จึงใช้อัตราส่วนต่อไปนี้:
ที่ไหน หลี่- ระยะห่างจากวัตถุ ความเร็วแสงในสุญญากาศ ดัชนีการหักเหของแสงของตัวกลางที่แผ่รังสี tคือเวลาที่แรงกระตุ้นไปถึงเป้าหมายและย้อนกลับ
การพิจารณาความสัมพันธ์นี้แสดงให้เห็นว่าความแม่นยำที่เป็นไปได้ของการวัดระยะทางนั้นพิจารณาจากความแม่นยำของการวัดเวลาที่ผ่านของพัลส์พลังงานไปยังวัตถุและย้อนกลับ เป็นที่ชัดเจนว่ายิ่งชีพจรสั้นยิ่งดี
3.1. ฐานทางกายภาพของการวัดและหลักการทำงาน
ภารกิจในการกำหนดระยะห่างระหว่างตัวค้นหาระยะและเป้าหมายจะลดลงเหลือเพียงการวัดช่วงเวลาที่สอดคล้องกันระหว่างสัญญาณโพรบกับสัญญาณ การสะท้อนจากเป้าหมาย มีสามวิธีในการวัดช่วง ขึ้นอยู่กับชนิดของการมอดูเลตการแผ่รังสีเลเซอร์ที่ใช้ในตัวค้นหาระยะ: พัลส์ เฟส หรือเฟสพัลส์ สาระสำคัญของวิธีการวัดระยะแบบพัลส์คือชีพจรที่ตรวจวัดได้จะถูกส่งไปยังวัตถุ ซึ่งจะเริ่มตัวนับเวลาในตัวค้นหาระยะด้วย เมื่อชีพจรที่สะท้อนจากวัตถุไปถึงเครื่องวัดระยะ ตัวนับจะหยุด ตามช่วงเวลา ระยะทางไปยังวัตถุจะแสดงที่ด้านหน้าของผู้ปฏิบัติงานโดยอัตโนมัติ ให้เราประเมินความถูกต้องของวิธีการที่หลากหลายนี้ หากทราบว่าความถูกต้องของการวัดช่วงเวลาระหว่างสัญญาณที่ตรวจสอบและสัญญาณที่สะท้อนนั้นสอดคล้องกับ 10 V -9 s เนื่องจากเราสามารถสรุปได้ว่าความเร็วของแสงคือ 3 * 10 ซม. / วินาที เราจึงได้รับข้อผิดพลาดในการเปลี่ยนระยะทางประมาณ 30 ซม. ผู้เชี่ยวชาญเชื่อว่านี่เพียงพอสำหรับการแก้ปัญหาในทางปฏิบัติจำนวนหนึ่ง
ด้วยวิธีการแบบแบ่งเฟส รังสีเลเซอร์จะถูกมอดูเลตตามกฎไซน์ ในกรณีนี้ ความเข้มของการแผ่รังสีจะแตกต่างกันภายในช่วงที่มีนัยสำคัญ เฟสของสัญญาณที่ตกลงบนวัตถุจะเปลี่ยนไปขึ้นอยู่กับระยะห่างจากวัตถุ สัญญาณที่สะท้อนจากวัตถุจะมาถึงอุปกรณ์รับสัญญาณด้วยระยะหนึ่งเช่นกัน ขึ้นอยู่กับระยะทาง ให้เราประเมินข้อผิดพลาดของตัวค้นหาระยะเฟสที่เหมาะสมสำหรับการใช้งานภาคสนาม ผู้เชี่ยวชาญกล่าวว่าผู้ปฏิบัติงานสามารถกำหนดเฟสได้โดยมีข้อผิดพลาดไม่เกินหนึ่งองศา หากความถี่การปรับของการแผ่รังสีเลเซอร์คือ 10 MHz ข้อผิดพลาดในการวัดระยะทางจะอยู่ที่ประมาณ 5 ซม.
ตามหลักการทำงาน เครื่องวัดระยะจะแบ่งออกเป็นสองกลุ่มหลักคือประเภทเรขาคณิตและทางกายภาพ

รูปที่ 2 หลักการทำงานของเครื่องวัดระยะ
กลุ่มแรกประกอบด้วยเครื่องวัดระยะเชิงเรขาคณิต การวัดระยะทางด้วยเครื่องวัดระยะประเภทนี้ขึ้นอยู่กับการกำหนดความสูง h ของสามเหลี่ยมหน้าจั่ว ABC (รูปที่ 3) ตัวอย่างเช่น การใช้ด้านที่ทราบ AB = I (ฐาน) และมุมแหลมที่อยู่ตรงข้ามกัน ปริมาณหนึ่งคือ I มักจะเป็นค่าคงที่ และอีกค่าหนึ่งเป็นตัวแปร (วัด) บนพื้นฐานนี้ เครื่องวัดระยะที่มีมุมคงที่และเครื่องวัดระยะที่มีฐานคงที่จะมีความแตกต่างกัน เครื่องวัดระยะแบบมุมคงที่คือกล้องโทรทรรศน์ที่มีเส้นใยคู่ขนานสองเส้นในด้านการมองเห็น และฐานเป็นรางแบบพกพาที่มีการแบ่งส่วนเท่ากัน ระยะห่างจากฐานที่วัดโดยเครื่องวัดระยะเป็นสัดส่วนกับจำนวนแผนกของพนักงานที่มองเห็นได้ผ่านกล้องโทรทรรศน์ระหว่างด้าย เครื่องมือ geodetic จำนวนมาก (กล้องสำรวจ ระดับ ฯลฯ) ทำงานตามหลักการนี้ ข้อผิดพลาดสัมพัทธ์ของเครื่องวัดระยะแบบฟิลาเมนต์คือ 0.3-1% เครื่องวัดระยะด้วยแสงที่ซับซ้อนมากขึ้นพร้อมฐานคงที่ถูกสร้างขึ้นบนหลักการของการรวมภาพของวัตถุ ซึ่งสร้างขึ้นโดยรังสีที่ผ่านระบบออพติคอลต่างๆ ของเครื่องวัดระยะ การรวมกันจะดำเนินการโดยใช้ตัวชดเชยแสงที่อยู่ในระบบออปติคัลระบบใดระบบหนึ่ง และอ่านผลการวัดในสเกลพิเศษ เครื่องวัดระยะแบบตาเดียวที่มีฐาน 3-10 ซม. นิยมใช้เป็นเครื่องวัดระยะแบบถ่ายภาพ ข้อผิดพลาดของเครื่องวัดระยะด้วยแสงที่มีฐานคงที่น้อยกว่า 0.1% ของระยะทางที่วัดได้
หลักการทำงานของเครื่องวัดระยะทางกายภาพคือการวัดเวลาที่ใช้สัญญาณที่ส่งโดยเครื่องวัดระยะเพื่อเดินทางระยะทางไปยังวัตถุและย้อนกลับ ความสามารถของรังสีแม่เหล็กไฟฟ้าในการแพร่กระจายด้วยความเร็วคงที่ทำให้สามารถกำหนดระยะห่างจากวัตถุได้ แยกแยะวิธีวัดระยะทางและพัลส์เฟส
ด้วยวิธีพัลส์ พัลส์แบบละเอียดจะถูกส่งไปยังวัตถุ ซึ่งจะเริ่มตัวนับเวลาในตัวค้นหาระยะ เมื่อชีพจรที่สะท้อนจากวัตถุกลับมายังเครื่องวัดระยะ ตัวนับจะหยุด ตามช่วงเวลา (ความล่าช้าของพัลส์ที่สะท้อน) โดยใช้ไมโครโปรเซสเซอร์ในตัว ระยะห่างจากวัตถุจะถูกกำหนด:
โดยที่: L คือระยะทางไปยังวัตถุ c คือความเร็วของการแพร่กระจายของรังสี t คือเวลาที่ชีพจรไปถึงเป้าหมายและย้อนกลับ
ข้าว. 3 - หลักการทำงานของเครื่องวัดระยะแบบเรขาคณิต
AB - ฐาน h - ระยะทางที่วัดได้
ด้วยวิธีเฟส การแผ่รังสีจะถูกมอดูเลตตามกฎไซน์โดยใช้โมดูเลเตอร์ (คริสตัลออปติคัลไฟฟ้าที่เปลี่ยนพารามิเตอร์ภายใต้อิทธิพลของสัญญาณไฟฟ้า) รังสีสะท้อนเข้าสู่ตัวตรวจจับแสง โดยจะดึงสัญญาณมอดูเลตออก เฟสของสัญญาณสะท้อนจะเปลี่ยนแปลงโดยสัมพันธ์กับเฟสของสัญญาณในโมดูเลเตอร์ทั้งนี้ขึ้นอยู่กับระยะห่างจากวัตถุ โดยการวัดความต่างเฟส ระยะห่างจากวัตถุจะถูกวัด
3.2 คุณสมบัติการออกแบบและหลักการทำงาน ประเภทและการสมัคร
เครื่องวัดระยะด้วยเลเซอร์ XM-23 เครื่องแรกได้รับการทดสอบและนำไปใช้โดยกองทัพ ออกแบบมาเพื่อใช้ในเสาสังเกตการณ์ขั้นสูงของกองกำลังภาคพื้นดิน แหล่งกำเนิดรังสีในนั้นคือเลเซอร์ทับทิมที่มีกำลังขับ 2.5 W และระยะเวลาพัลส์ 30 ns วงจรรวมมีการใช้กันอย่างแพร่หลายในการออกแบบเครื่องวัดระยะ อิมิตเตอร์ ตัวรับ และองค์ประกอบออปติคัลถูกติดตั้งในโมโนบล็อก ซึ่งมีสเกลสำหรับการรายงานมุมราบและมุมเงยของเป้าหมายอย่างแม่นยำ เครื่องวัดระยะใช้พลังงานจากแบตเตอรี่นิกเกิลแคดเมียม 24V ที่ให้การวัดระยะ 100 ช่วงโดยไม่ต้องชาร์จใหม่ ในอีกรูปแบบหนึ่ง ปืนใหญ่วัดระยะนอกจากนี้ กองทัพยังใช้อุปกรณ์สำหรับกำหนดช่วงของเป้าหมายสูงสุดสี่เป้าหมายพร้อมกันบนเส้นตรงเดียวกันได้พร้อมกันด้วยระยะการแฟลชต่อเนื่องที่ 200,600,1000, 2000 และ 3000 ม.
เครื่องวัดระยะด้วยเลเซอร์ของสวีเดนที่น่าสนใจ มีไว้สำหรับใช้ในระบบควบคุมการยิงของปืนใหญ่บนเรือและปืนใหญ่ชายฝั่ง การออกแบบเครื่องวัดระยะมีความทนทานเป็นพิเศษ ซึ่งช่วยให้ใช้งานได้ในสภาวะที่ยากลำบาก สามารถจับคู่เครื่องวัดระยะด้วยเครื่องขยายภาพหรือเครื่องรับโทรทัศน์หากจำเป็น โหมดการทำงานของเครื่องวัดระยะให้การวัดอย่างใดอย่างหนึ่งทุกๆ 2 วินาที ภายใน 20 วินาที และหยุดระหว่างชุดการวัดเป็นเวลา 20 วินาที หรือทุกๆ 4 วินาที เป็นเวลานาน. ตัวบ่งชี้ช่วงดิจิตอลทำงานในลักษณะที่เมื่อตัวบ่งชี้ตัวใดตัวหนึ่งให้ช่วงที่วัดล่าสุด การวัดระยะทางสี่ครั้งก่อนหน้านี้จะถูกเก็บไว้ในหน่วยความจำของอีกตัวหนึ่ง
เครื่องวัดระยะด้วยเลเซอร์ที่ประสบความสำเร็จอย่างมากคือ LP-4 มีชัตเตอร์แบบออปติคัลกลไกเป็น Q-switch ส่วนรับของเรนจ์ไฟน์เดอร์ก็เป็นภาพของผู้ควบคุมด้วยเช่นกัน เส้นผ่านศูนย์กลางของระบบออปติคัลอินพุตคือ 70 มม. ตัวรับสัญญาณเป็นโฟโตไดโอดแบบพกพา ซึ่งความไวแสงมีค่าสูงสุดที่ความยาวคลื่น 1.06 ไมโครเมตร เครื่องวัดนี้มีวงจรสโตรบิงแบบช่วง ซึ่งทำงานตามการตั้งค่าของผู้ปฏิบัติงานตั้งแต่ 200 ถึง 3000 ม. ในรูปแบบของการมองเห็นด้วยแสง ฟิลเตอร์ป้องกันจะวางอยู่ด้านหน้าเลนส์ใกล้ตาเพื่อปกป้องดวงตาของผู้ปฏิบัติงานจากผลกระทบของเลเซอร์เมื่อได้รับชีพจรที่สะท้อนกลับ ตัวปล่อยและตัวรับถูกติดตั้งในเรือนเดียว มุมเงยของเป้าหมายถูกกำหนดภายใน +25 องศา แบตเตอรี่ให้การวัดระยะทาง 150 โดยไม่ต้องชาร์จ น้ำหนักเพียง 1 กก. เครื่องวัดระยะได้รับการทดสอบและซื้อในหลายประเทศ เช่น - แคนาดา สวีเดน เดนมาร์ก อิตาลี ออสเตรเลีย นอกจากนี้ กระทรวงกลาโหมอังกฤษได้ลงนามในสัญญาจัดหาเครื่องค้นหาระยะ LP-4 ที่ดัดแปลงแล้วซึ่งมีน้ำหนัก 4.4 กก. ให้กับกองทัพอังกฤษ
เครื่องวัดระยะด้วยเลเซอร์แบบพกพาได้รับการออกแบบมาสำหรับหน่วยทหารราบและผู้สังเกตการณ์ปืนใหญ่ หนึ่งในเครื่องวัดระยะเหล่านี้ทำขึ้นในรูปแบบของกล้องส่องทางไกล แหล่งกำเนิดรังสีและเครื่องรับถูกติดตั้งในตัวเรือนทั่วไป โดยมีเลนส์ตาเดียวกำลังขยายหกเท่า ในมุมมองที่มีแผงไฟ LED ซึ่งแยกความแตกต่างได้อย่างชัดเจนทั้งในเวลากลางคืนและระหว่างวัน . เลเซอร์ใช้โกเมนอะลูมิเนียมอิตเทรียมเป็นแหล่งรังสี โดยมีสวิตช์ Q บนลิเธียมไนโอเบต ให้กำลังสูงสุด 1.5 เมกะวัตต์ ชิ้นส่วนที่รับนั้นใช้เครื่องตรวจจับโฟโตดีเทกเตอร์แบบคู่ที่มีแอมพลิฟายเออร์สัญญาณรบกวนต่ำแบบบรอดแบนด์ ซึ่งทำให้สามารถตรวจจับพัลส์สั้น ๆ ด้วยพลังงานต่ำเพียง 10 V -9 W ได้ สัญญาณเท็จที่สะท้อนจากวัตถุใกล้เคียงที่อยู่ในถังกับเป้าหมายจะถูกกำจัดโดยใช้วงจรกั้นระยะ แหล่งพลังงานเป็นแบตเตอรี่ขนาดเล็กแบบชาร์จไฟได้ 250 การวัดโดยไม่ต้องชาร์จใหม่ หน่วยอิเล็กทรอนิกส์ของเครื่องวัดระยะถูกสร้างขึ้นบนวงจรรวมและวงจรไฮบริด ซึ่งทำให้สามารถเพิ่มมวลของเครื่องวัดระยะร่วมกับแหล่งพลังงานได้ถึง 2 กก.
การติดตั้งเครื่องวัดระยะด้วยเลเซอร์บนรถถังทำให้ผู้พัฒนาอาวุธทหารต่างชาติสนใจในทันที นี่เป็นเพราะความจริงที่ว่าในรถถังนั้น เป็นไปได้ที่จะแนะนำเครื่องวัดระยะในระบบควบคุมการยิงของรถถัง ซึ่งจะเป็นการเพิ่มคุณภาพการรบ ด้วยเหตุนี้ AN / VVS-1 rangefinder จึงถูกพัฒนาขึ้นสำหรับรถถัง M60A มันไม่ได้แตกต่างในการออกแบบจากเครื่องวัดระยะด้วยปืนใหญ่เลเซอร์บนทับทิม อย่างไรก็ตาม นอกเหนือจากการแสดงข้อมูลระยะบนจอแสดงผลดิจิตอลในเครื่องคำนวณระบบควบคุมการยิงของรถถังแล้ว ในกรณีนี้ การวัดระยะสามารถทำได้ทั้งโดยมือปืนและผู้บัญชาการรถถัง โหมดการทำงานของ Rangefinder - 15 การวัดต่อนาทีเป็นเวลาหนึ่งชั่วโมง สื่อต่างประเทศรายงานว่าเครื่องวัดระยะขั้นสูงซึ่งพัฒนาขึ้นในภายหลังมีขอบเขตจำกัดตั้งแต่ 200 ถึง 4700 เมตร ด้วยความแม่นยำ +10 ม. และคอมพิวเตอร์ที่เชื่อมต่อกับระบบควบคุมการยิงของรถถัง ซึ่งเมื่อรวมกับข้อมูลอื่นแล้ว ข้อมูลกระสุนอีก 9 ประเภทจะถูกประมวลผล นักพัฒนากล่าวว่าสิ่งนี้ทำให้สามารถโจมตีเป้าหมายด้วยการยิงครั้งแรก ระบบควบคุมการยิงของปืนรถถังมีระบบอนาล็อก ซึ่งถือว่าก่อนหน้านี้เป็นเครื่องวัดระยะ แต่มีเซ็นเซอร์รับความรู้สึกอีกเจ็ดตัวและสายตาแบบออปติคัล ชื่อของการติดตั้ง Kobeld สื่อมวลชนรายงานว่ามีความเป็นไปได้สูงที่จะชนกับเป้าหมาย และถึงแม้จะมีความซับซ้อนของการติดตั้งนี้ กลไกขีปนาวุธจะสลับไปยังตำแหน่งที่สอดคล้องกับประเภทของการยิงที่เลือก จากนั้นกดปุ่มเลเซอร์เรนจ์ไฟน เมื่อทำการยิงไปที่เป้าหมายที่กำลังเคลื่อนที่ มือปืนจะลดสวิตช์อินเตอร์ล็อคควบคุมการยิงลงเพิ่มเติม เพื่อให้สัญญาณจากเซ็นเซอร์ความเร็วการเคลื่อนที่ของป้อมปืนเมื่อติดตามเป้าหมายไปด้านหลังมาตรวัดความเร็วไปยังอุปกรณ์คำนวณ ซึ่งช่วยสร้างสัญญาณจากสถาบัน เครื่องวัดระยะด้วยเลเซอร์ซึ่งเป็นส่วนหนึ่งของระบบ Kobeld ช่วยให้คุณวัดระยะพร้อมกันกับเป้าหมายสองชิ้นที่อยู่ในแนวเดียวกันได้ ระบบทำงานรวดเร็ว ซึ่งช่วยให้คุณถ่ายภาพได้ในเวลาที่สั้นที่สุด
การวิเคราะห์กราฟแสดงให้เห็นว่าการใช้ระบบที่มีเครื่องวัดระยะด้วยเลเซอร์และคอมพิวเตอร์ให้ความน่าจะเป็นที่จะตีเป้าหมายใกล้กับเป้าหมายที่คำนวณได้ กราฟยังแสดงให้เห็นว่ามีโอกาสมากขึ้นที่จะไปถึงเป้าหมายที่กำลังเคลื่อนที่ หากเป้าหมายอยู่กับที่ ความน่าจะเป็นที่จะชนเมื่อใช้ระบบเลเซอร์ เทียบกับความน่าจะเป็นของการชนเมื่อใช้ระบบที่มีเครื่องวัดระยะแบบสเตอริโอ ไม่ได้สร้างความแตกต่างอย่างมากในระยะทางประมาณ 1,000 ม. และรู้สึกได้เพียงระยะ 1500 ม. หรือ มากกว่านั้นสำหรับการย้ายเป้าหมาย กำไรจะชัดเจน จะเห็นได้ว่าความน่าจะเป็นที่จะชนเป้าหมายที่กำลังเคลื่อนที่เมื่อใช้ระบบเลเซอร์ เมื่อเทียบกับความน่าจะเป็นที่จะชนเมื่อใช้ระบบที่มีตัวค้นหาระยะแบบสเตอริโออยู่แล้วที่ระยะ 100 เมตร เพิ่มขึ้นมากกว่า 3.5 เท่า และที่ ระยะทาง 2,000 ม. ซึ่งระบบที่มีตัวค้นหาระยะแบบสเตอริโอใช้งานไม่ได้จริง ระบบเลเซอร์จะมีโอกาสพ่ายแพ้จากการยิงครั้งแรกประมาณ 0.3
ในกองทัพ นอกจากปืนใหญ่และรถถังแล้ว เครื่องค้นหาระยะด้วยเลเซอร์ยังใช้ในระบบที่จำเป็นต้องกำหนดระยะด้วยความแม่นยำสูงในระยะเวลาอันสั้น ดังนั้นในสื่อรายงานจึงมีการพัฒนาระบบอัตโนมัติสำหรับติดตามเป้าหมายอากาศและวัดระยะทางไปยังเป้าหมายเหล่านั้น ระบบช่วยให้วัดมุมราบ ระดับความสูง และช่วงได้อย่างแม่นยำ สามารถบันทึกข้อมูลลงบนเทปแม่เหล็กและประมวลผลบนคอมพิวเตอร์ได้ ระบบมีขนาดเล็กและน้ำหนักและวางบนรถตู้เคลื่อนที่ ระบบรวมถึงการทำงานของเลเซอร์ในช่วงอินฟราเรด ตัวรับสัญญาณกล้องโทรทัศน์อินฟราเรด จอทีวี กระจกติดตามสายเซอร์โว จอแสดงผลดิจิตอลและเครื่องบันทึก อุปกรณ์เลเซอร์แก้วนีโอไดเมียมทำงานในโหมด Q-switched และปล่อยพลังงานที่ความยาวคลื่น 1.06 µm พลังงานรังสีคือ 1 เมกะวัตต์ต่อพัลส์โดยมีระยะเวลา 25 ns และอัตราการเกิดซ้ำของพัลส์ที่ 100 เฮิรตซ์ ความแตกต่างของลำแสงเลเซอร์คือ 10 mrad ช่องติดตามใช้เครื่องตรวจจับแสงประเภทต่างๆ ตัวรับสัญญาณใช้ไฟ LED แบบซิลิกอน ในช่องติดตาม - ตะแกรงที่ประกอบด้วยโฟโตไดโอดสี่ตัวซึ่งสร้างสัญญาณที่ไม่ตรงกันเมื่อเป้าหมายถูกเลื่อนออกจากแกนสายตาในมุมราบและระดับความสูง สัญญาณจากเครื่องรับแต่ละตัวจะถูกส่งไปยังเครื่องขยายสัญญาณวิดีโอที่มีการตอบสนองแบบลอการิทึมและช่วงไดนามิกที่ 60 dB สัญญาณเกณฑ์ขั้นต่ำที่ระบบตรวจสอบเป้าหมายคือ 5 * 10V-8W กระจกติดตามเป้าหมายขับเคลื่อนในแนวราบและระดับความสูงด้วยเซอร์โวมอเตอร์ ระบบติดตามช่วยให้คุณระบุตำแหน่งของเป้าหมายทางอากาศได้ในระยะทางสูงสุด 19 กม. ในขณะที่ความแม่นยำในการติดตามเป้าหมายซึ่งกำหนดโดยการทดลองคือ 0.1 mrad ในมุมราบและระดับความสูง 0.2 mrad ของเป้าหมาย ความแม่นยำในการวัดระยะทาง + 15 ซม.
เครื่องวัดระยะด้วยเลเซอร์บนกระจกทับทิมและนีโอไดเมียมให้การวัดระยะทางไปยังวัตถุที่อยู่กับที่หรือเคลื่อนที่ช้าๆ เนื่องจากอัตราการเต้นของชีพจรต่ำ ไม่เกินหนึ่งเฮิรตซ์ หากจำเป็นต้องวัดระยะทางสั้น ๆ แต่ด้วยความถี่ของรอบการวัดที่สูงกว่า ก็จะใช้เครื่องวัดระยะเฟสที่มีตัวปล่อยเลเซอร์เซมิคอนดักเตอร์ ตามกฎแล้วพวกเขาใช้แกลเลียมอาร์เซไนด์เป็นแหล่ง นี่คือคำอธิบายของ rangefinders ตัวใดตัวหนึ่ง: กำลังขับ 6.5 W ต่อพัลส์ ระยะเวลาคือ 0.2 μs และอัตราการเกิดซ้ำของพัลส์คือ 20 kHz ความแตกต่างของลำแสงเลเซอร์คือ 350*160 mrad เช่น คล้ายกลีบดอก หากจำเป็น ความแตกต่างเชิงมุมของลำแสงจะลดลงเหลือ 2 mrad ตัวรับประกอบด้วยระบบออปติคัล และระนาบโฟกัสซึ่งเป็นไดอะแฟรมที่จำกัดขอบเขตการมองเห็นของเครื่องรับให้มีขนาดที่ต้องการ Collimation ดำเนินการโดยเลนส์โฟกัสสั้นที่อยู่ด้านหลังไดอะแฟรม ความยาวคลื่นในการทำงานคือ 0.902 ไมครอนและช่วงตั้งแต่ 0 ถึง 400 เมตร สื่อมวลชนรายงานว่าคุณลักษณะเหล่านี้ได้รับการปรับปรุงอย่างมากในการออกแบบในภายหลัง ตัวอย่างเช่น เครื่องวัดระยะด้วยเลเซอร์ที่มีช่วง 1500m ได้รับการพัฒนาขึ้นแล้ว และความแม่นยำในการวัดระยะทาง + 30m. เครื่องวัดระยะนี้มีอัตราการทำซ้ำ 12.5 kHz โดยมีระยะเวลาพัลส์ 1 μs เครื่องวัดระยะอีกรุ่นหนึ่งที่พัฒนาขึ้นในสหรัฐอเมริกามีช่วง 30 ถึง 6400 เมตร กำลังพัลส์คือ 100W และอัตราการทำซ้ำของพัลส์คือ 1,000 Hz
เนื่องจากมีการใช้เครื่องวัดระยะหลายประเภท จึงมีแนวโน้มที่จะรวมระบบเลเซอร์ในรูปแบบของโมดูลที่แยกจากกัน ทำให้การประกอบง่ายขึ้น เช่นเดียวกับการเปลี่ยนโมดูลแต่ละโมดูลระหว่างการทำงาน ผู้เชี่ยวชาญกล่าวว่าการออกแบบโมดูลาร์ของเครื่องวัดระยะด้วยเลเซอร์ช่วยให้มีความน่าเชื่อถือและความสามารถในการบำรุงรักษาสูงสุดในภาคสนาม
โมดูลอีซีแอลประกอบด้วยแท่ง, หลอดปั๊ม, ไฟส่องสว่าง, หม้อแปลงไฟฟ้าแรงสูง และกระจกสะท้อนเสียง โมดูเลเตอร์ที่มีคุณภาพ แหล่งกำเนิดรังสีมักใช้แก้วนีโอไดเมียมหรือโกเมนโซเดียมอะลูมิเนียม ซึ่งช่วยให้มั่นใจได้ว่าเครื่องวัดระยะทำงานโดยไม่ต้องใช้ระบบระบายความร้อน องค์ประกอบทั้งหมดของศีรษะเหล่านี้ถูกวางไว้ในร่างกายทรงกระบอกที่แข็ง การตัดเฉือนที่นั่งที่ปลายทั้งสองด้านของตัวกระบอกสูบของส่วนหัวอย่างแม่นยำช่วยให้เปลี่ยนและติดตั้งได้อย่างรวดเร็วโดยไม่ต้องปรับแต่งเพิ่มเติม ซึ่งช่วยให้บำรุงรักษาและซ่อมแซมได้ง่าย สำหรับการปรับตั้งต้นของระบบออพติคอล จะใช้กระจกอ้างอิงซึ่งติดตั้งบนพื้นผิวที่กลึงอย่างระมัดระวังของส่วนหัว ซึ่งตั้งฉากกับแกนของตัวกล้องทรงกระบอก ไฟส่องประเภทกระจายประกอบด้วยกระบอกสูบสองกระบอกที่สอดเข้าไปในอีกอันหนึ่ง ระหว่างผนังซึ่งมีชั้นของแมกนีเซียมออกไซด์ Q-switch ได้รับการออกแบบสำหรับการทำงานที่เสถียรอย่างต่อเนื่องหรือแบบพัลซ์พร้อมการเริ่มต้นอย่างรวดเร็ว ข้อมูลหลักของหัวแบบรวมมีดังนี้: ความยาวคลื่น - 1.06 μm, พลังงานปั๊ม - 25 J, พลังงานพัลส์เอาต์พุต - 0.2 J, ระยะเวลาพัลส์ 25 ns, อัตราการทำซ้ำของพัลส์ 0.33 Hz เป็นเวลา 12 วินาที, การทำงานด้วยความถี่ 1 Hz อนุญาต) มุมไดเวอร์เจนซ์คือ 2 mrad เนื่องจากความไวแสงสูงต่อสัญญาณรบกวนภายใน โฟโตไดโอด พรีแอมพลิฟายเออร์ และพาวเวอร์ซัพพลายจึงถูกติดตั้งในเคสเดียวที่มีเลย์เอาต์ที่หนาแน่นที่สุด และในบางรุ่น โฟโตไดโอด พรีแอมพลิฟายเออร์และพาวเวอร์ซัพพลายทั้งหมดถูกผลิตขึ้นในยูนิตขนาดกะทัดรัดเพียงตัวเดียว สิ่งนี้ให้ความไวของคำสั่ง 5 * 10 ใน -8 วัตต์
แอมพลิฟายเออร์มีวงจรธรณีประตูที่เปิดใช้งานในขณะที่พัลส์ถึงครึ่งหนึ่งของแอมพลิจูดสูงสุดซึ่งช่วยเพิ่มความแม่นยำของเรนจ์ไฟน์เพราะจะช่วยลดผลกระทบของความผันผวนของแอมพลิจูดของพัลส์ที่เข้ามา สัญญาณเริ่มต้นและหยุดถูกสร้างขึ้นโดยเครื่องตรวจจับแสงเดียวกันและเดินตามเส้นทางเดียวกัน ซึ่งช่วยขจัดข้อผิดพลาดที่เป็นระบบ ระบบออปติคัลประกอบด้วยกล้องโทรทรรศน์ afocal เพื่อลดความแตกต่างของลำแสงเลเซอร์และเลนส์โฟกัสสำหรับเครื่องตรวจจับแสง โฟโตไดโอดมีเส้นผ่านศูนย์กลางพื้นที่ใช้งาน 50, 100 และ 200 µm การลดขนาดลงอย่างมากนั้นอำนวยความสะดวกโดยการรวมระบบรับและส่งสัญญาณออปติคัลเข้าด้วยกัน และส่วนกลางจะใช้เพื่อสร้างการแผ่รังสีของตัวส่งสัญญาณ และอุปกรณ์ต่อพ่วงใช้เพื่อรับสัญญาณที่สะท้อนจากเป้าหมาย
4. เครื่องวัดระยะด้วยแสง
Optical rangefinders เป็นชื่อทั่วไปสำหรับกลุ่มของ rangefinders ที่มีการเล็งไปที่วัตถุ (เป้าหมาย) ซึ่งการดำเนินการจะขึ้นอยู่กับการใช้กฎของออปติกทางเรขาคณิต (ลำแสง) เครื่องวัดระยะแบบออปติคัลเป็นเรื่องปกติ: ด้วยมุมคงที่และฐานระยะไกล (เช่น เครื่องวัดระยะแบบฟิลาเมนต์ซึ่งจัดหาให้โดยเครื่องมือ geodetic จำนวนมาก - กล้องสำรวจ ระดับ ฯลฯ ); มีฐานภายในคงที่ - ตาข้างเดียว (เช่น เครื่องวัดระยะถ่ายภาพ) และกล้องสองตา (เครื่องวัดระยะแบบสามมิติ)
Optical range finder (light range finder) - อุปกรณ์สำหรับวัดระยะทางตามเวลาที่ใช้การแผ่รังสีแสง (แสง) ในการเดินทางระยะทางที่วัดได้ เครื่องวัดระยะด้วยแสงประกอบด้วยแหล่งกำเนิดรังสีออปติคัล อุปกรณ์สำหรับควบคุมพารามิเตอร์ ระบบส่งและรับ เครื่องตรวจจับแสง และอุปกรณ์สำหรับการวัดช่วงเวลา เครื่องวัดระยะแบบออปติคัลแบ่งออกเป็นพัลส์และเฟสขึ้นอยู่กับวิธีการกำหนดเวลาที่ใช้ในการแผ่รังสีในการเดินทางระยะทางจากวัตถุและด้านหลัง

ข้าว. 4 - เครื่องวัดระยะด้วยแสงที่ทันสมัย

รูปที่ 5 - เครื่องวัดระยะแบบออปติคอล "Seagull"
ใน rangefinders ไม่ใช่ความยาวของเส้นที่วัด แต่เป็นค่าอื่นที่สัมพันธ์กับความยาวของเส้นที่เป็นฟังก์ชัน
ดังที่ได้กล่าวไว้ก่อนหน้านี้ เครื่องวัดระยะ 3 ประเภทที่ใช้ใน geodesy:
ออปติคัล (เครื่องวัดระยะแบบเรขาคณิต)
ไฟฟ้าออปติคอล (ตัวค้นหาช่วงแสง)
วิศวกรรมวิทยุ (เครื่องวัดระยะวิทยุ)
4.1. ฐานทางกายภาพของการวัดและหลักการทำงาน

ข้าว. 6 โครงร่างเรขาคณิตของเครื่องวัดระยะด้วยแสง
ให้มันต้องหาระยะทาง AB เราวางเครื่องวัดระยะด้วยแสงที่จุด A และรางที่จุด B ตั้งฉากกับเส้น AB
แสดงถึง: l - ส่วนของราง GM,
φ - มุมที่มองเห็นส่วนนี้จากจุด A
จากสามเหลี่ยม AGB เรามี:
D=1/2*ctg(φ/2) (4.1.1)
D = ล. * stg(φ) (4.1.2)
โดยปกติมุม φ จะเล็ก (สูงถึง 1 o) และโดยการใช้การขยายของฟังก์ชัน Ctgφ ในอนุกรมนั้น สูตร (4.1.1) สามารถลดขนาดลงเป็นรูปแบบ (4.1.2) ทางด้านขวาของสูตรเหล่านี้ มีอาร์กิวเมนต์สองอาร์กิวเมนต์ที่ระยะทาง D เป็นฟังก์ชัน หากหนึ่งในอาร์กิวเมนต์มีค่าคงที่ เพื่อค้นหาระยะทาง D ก็เพียงพอที่จะวัดค่าเดียวเท่านั้น ขึ้นอยู่กับค่า - φ หรือ l - มีค่าคงที่ มีเครื่องวัดระยะที่มีมุมคงที่และเครื่องวัดระยะด้วยค่าคงที่
ในเครื่องวัดระยะที่มีมุมคงที่ ส่วน l จะถูกวัด และมุม φ เป็นค่าคงที่ เรียกว่ามุมไดแอสติโมเมตริก
ในเครื่องวัดระยะที่มีฐานคงที่ มุม φ จะถูกวัด ซึ่งเรียกว่ามุมพารัลแลกติก ส่วน l มีความยาวคงที่ที่ทราบและเรียกว่าฐาน
4.1.2 เครื่องวัดระยะเกลียวมุมคงที่
ในกริดของเกลียวของกล้องโทรทรรศน์ตามกฎแล้วจะมีเธรดแนวนอนเพิ่มเติมสองเธรดที่อยู่ทั้งสองด้านของศูนย์กลางของกริดของเธรดที่ระยะห่างเท่ากัน เหล่านี้เป็นเธรดเรนจ์ไฟนเดอร์ (รูปที่ 7)
มาวาดเส้นทางของรังสีที่ผ่านเส้นใยเรนจ์ไฟนในหลอดเคปเลอร์ด้วยการโฟกัสภายนอกกัน ติดตั้งอุปกรณ์เหนือจุด A; ที่จุด B มีรางติดตั้งตั้งฉากกับแนวสายตาของท่อ หาระยะห่างระหว่างจุด A และ B

ข้าว. 7 - เธรดตัวค้นหาระยะ
มาสร้างเส้นทางของรังสีจากจุด m และ g ของเส้นค้นหาระยะกัน รังสีจากจุด m และ g ซึ่งขนานไปกับแกนออปติคัล หลังจากการหักเหของเลนส์ใกล้วัตถุ จะข้ามแกนนี้ที่จุดโฟกัสด้านหน้า F และตกลงไปที่จุด M และ G ของราง ระยะทางจากจุด A ถึงจุด B จะเป็น:
D = l/2 * Ctg(φ/2) + frev + d (4.1.2.1)
โดยที่ d คือระยะห่างจากศูนย์กลางของเลนส์ถึงแกนหมุนของกล้องสำรวจ
ฉ เกี่ยวกับ - ความยาวโฟกัสของเลนส์;
l คือความยาวของเซ็กเมนต์ MG บนราง
แสดงว่า (f about + d) ถึง c และค่า 1/2*Ctg φ/2 - ถึง C แล้ว
D = C * l + c. (4.1.2.2)
ค่าคงที่ C เรียกว่าสัมประสิทธิ์เรนจ์ไฟนเดอร์ จาก Dm "OF เรามี:
Ctg φ / 2 \u003d ОF / m "O; m" O \u003d p / 2 (4.1.2.3)
Ctg φ/2 = (fob*2)/p, (4.1.2.4)
โดยที่ p คือระยะห่างระหว่างเธรดการค้นหาช่วง ต่อไปเราจะเขียน:
C \u003d f เกี่ยวกับ / p. (4.1.2.5)
ค่าสัมประสิทธิ์เรนจ์ไฟนเดอร์เท่ากับอัตราส่วนของทางยาวโฟกัสของเลนส์กับระยะห่างระหว่างเส้นใยเรนจ์ไฟนเดอร์ โดยปกติค่าสัมประสิทธิ์ C จะถูกนำมาเท่ากับ 100 จากนั้น Ctg φ / 2 = 200 และ φ = 34.38 " ที่ C = 100 และ fob = 200 มม. ระยะห่างระหว่างเกลียวคือ 2 มม.
4.1.3 การวัดระยะความชันด้วยเครื่องวัดระยะไส้หลอด
ให้เส้นเล็งของท่อ JK เมื่อวัดระยะทาง AB มีมุมเอียง ν และส่วน l ถูกวัดตามราง (รูปที่ 8) หากรางถูกติดตั้งในแนวตั้งฉากกับแนวสายตาของท่อ ระยะความชันจะเป็น:
D = l 0 * C + c (4.1.3.1)
l 0 = l*Cos ν (4.1.3.2)
D = C*l*Cosν + c. (4.1.3.3)
ระยะทางแนวนอนของเส้น S ถูกกำหนดจาก Δ JKE:
S = D*Cosν (4.1.3.4)
S= C*l*Cos2v + c*Cosv. (4.1.3.5)

ข้าว. 8 - การวัดระยะลาดเอียงด้วยเครื่องวัดระยะแบบฟิลาเมนต์
เพื่อความสะดวกในการคำนวณ เราใช้เทอมที่สองเท่ากับ c*Cos2ν ; เนื่องจากค่า c มีขนาดเล็ก (ประมาณ 30 ซม.) การเปลี่ยนดังกล่าวจะไม่ทำให้เกิดข้อผิดพลาดที่เห็นได้ชัดเจนในการคำนวณ แล้ว
S = (C * l + c) * Cos 2 ν (4.1.3.6)
S = D"* Cos2v (4.1.3.7)
โดยปกติค่า (C * l + c) จะเรียกว่าระยะการหาระยะ ให้เราแสดงความแตกต่าง (D" - S) โดย ΔD และเรียกมันว่าการแก้ไขเพื่อลดขอบฟ้าแล้ว
S = D" – ∆D (4.1.3.8)
ΔD = D" * บาป 2 ν (4.1.3.9)
มุม ν วัดโดยวงกลมแนวตั้งของกล้องสำรวจ โดยที่ไม่คำนึงถึงการแก้ไข ΔD ความแม่นยำของการวัดระยะทางด้วยเครื่องวัดระยะแบบฟิลาเมนต์มักจะประมาณค่าความคลาดเคลื่อนสัมพัทธ์ตั้งแต่ 1/100 ถึง 1/300
นอกจากเครื่องวัดระยะแบบฟิลาเมนต์ทั่วไปแล้ว ยังมีเครื่องวัดระยะแบบภาพซ้อนแบบออปติคัลอีกด้วย
4.2 คุณสมบัติการออกแบบและหลักการทำงาน
ในเครื่องวัดระยะแสงแบบพัลส์ แหล่งกำเนิดรังสีส่วนใหญ่มักเป็นเลเซอร์ ซึ่งการแผ่รังสีจะเกิดขึ้นในรูปของพัลส์สั้น ในการวัดระยะทางที่เปลี่ยนแปลงอย่างช้า ๆ จะใช้พัลส์เดี่ยวสำหรับระยะทางที่เปลี่ยนแปลงอย่างรวดเร็วจะใช้โหมดการแผ่รังสีพัลซิ่ง เลเซอร์โซลิดสเตตอนุญาตให้มีอัตราการทำซ้ำของพัลส์รังสีสูงถึง 50-100 Hz เซมิคอนดักเตอร์ - สูงถึง 104-105 Hz การก่อตัวของพัลส์รังสีสั้นในเลเซอร์สถานะของแข็งนั้นกระทำโดยบานประตูหน้าต่างแบบกลไก แบบไฟฟ้าออปติคัล หรือแบบอะคูสติกออปติคัล หรือแบบผสมกัน เลเซอร์ฉีดถูกควบคุมโดยกระแสฉีด
ในเครื่องค้นหาระยะแสงแบบเฟส หลอดไส้หรือหลอดแก๊ส ไฟ LED และเลเซอร์แทบทุกประเภทถูกใช้เป็นแหล่งกำเนิดแสง เครื่องวัดระยะแบบออปติคัลพร้อมไฟ LED ให้ช่วงสูงสุด 2-5 กม. พร้อมเลเซอร์ก๊าซเมื่อทำงานกับตัวสะท้อนแสงแบบออปติคัลบนวัตถุ - สูงสุด 100 กม. และการสะท้อนแสงแบบกระจายจากวัตถุ - สูงสุด 0.8 กม. ในทำนองเดียวกัน Optical Rangefinder พร้อม Semiconductor Lasers ให้ช่วง 15 และ 0.3 กม. ในการแผ่รังสีช่วงแสงแบบเฟส จะถูกมอดูเลตโดยการรบกวน โมดูเลเตอร์อะคูสติกออปติคัลและออปติคัลออปติคัล ในเครื่องวัดระยะด้วยแสงแบบไมโครเวฟ ตัวปรับสัญญาณแบบไฟฟ้าแบบออปติคัลที่อิงตามโครงสร้างคลื่นไมโครเวฟแบบเรโซเนเตอร์และท่อนำคลื่นจะถูกใช้
ในเครื่องค้นหาระยะแสงแบบพัลส์ โฟโตไดโอดมักใช้เป็นเครื่องตรวจจับแสง ในเครื่องค้นหาช่วงแสงเฟส การตรวจจับแสงจะดำเนินการโดยโฟโตมัลติเพลเยอร์ ความไวของเส้นทางการรับแสงของเครื่องวัดระยะด้วยแสงสามารถเพิ่มขึ้นได้หลายระดับโดยใช้การแปรผันของแสง ช่วงการทำงานของเครื่องวัดระยะแบบออปติคัลดังกล่าวถูกจำกัดด้วยความยาวที่เชื่อมโยงกัน) ของเลเซอร์ส่งสัญญาณ ขณะที่สามารถบันทึกการเคลื่อนไหวและการสั่นของวัตถุได้ไกลถึง 0.2 กม.
การวัดช่วงเวลามักใช้วิธีการนับพัลส์
5. สรุป
Rangefinder - เป็นอุปกรณ์ที่ดีที่สุดสำหรับการวัดระยะทางในระยะทางไกล ตอนนี้เครื่องวัดระยะด้วยเลเซอร์ถูกใช้ในยุทโธปกรณ์ทางทหารภาคพื้นดินและในการบินและกองทัพเรือ กล้องเรนจ์ไฟน์เตอร์จำนวนหนึ่งได้รับการรับรองจากหลายกองทัพทั่วโลก นอกจากนี้ เครื่องวัดระยะยังกลายเป็นส่วนสำคัญของการล่าสัตว์ ซึ่งทำให้เป็นเอกลักษณ์และมีประโยชน์มาก
6. รายการบรรณานุกรม
1. Gerasimov F.Ya., Govorukhin A.M. หนังสืออ้างอิงพจนานุกรมภูมิประเทศและภูมิศาสตร์โดยย่อ, 1968; M Nedra
หลักสูตรเบื้องต้นของทัศนศาสตร์และเครื่องวัดระยะ, Voenizdat, 1938, 136 p.
ยุทโธปกรณ์-กลยุทโธปกรณ์, โอโบรนพรหม, พ.ศ. 2483, 263 น.
4. ร้านอินเตอร์เน็ตของออปติก หลักการทำงานของเครื่องวัดระยะด้วยเลเซอร์ URL: http://www.optics4you.ru/article5.html
เวอร์ชันอิเล็กทรอนิกส์ของตำราเรียนในรูปแบบของไฮเปอร์เท็กซ์
ในสาขาวิชา "Geodesy" URL: http://cheapset.od.ua/4_3_2.html ตัวค้นหาช่วง บทคัดย่อ >> ธรณีวิทยา
K และ f + d = c เราได้รับ D = K n + c โดยที่ K คือสัมประสิทธิ์ เครื่องวัดระยะและ c เป็นค่าคงที่ เครื่องวัดระยะ. ข้าว. 8.4. เกลียว เครื่องวัดระยะ: a) - เครือข่ายของเธรด; b) - รูปแบบการกำหนด ... ระดับ อุปกรณ์ระดับเทคนิค ขึ้นอยู่กับ อุปกรณ์สมัครแล้ว...
การสร้างเครื่องวัดระยะชีพจรด้วยเลเซอร์เป็นหนึ่งในการใช้งานเลเซอร์ครั้งแรกในเทคโนโลยีทางการทหาร การวัดระยะไปยังเป้าหมายเป็นงานทั่วไปของการยิงด้วยปืนใหญ่ ซึ่งแก้ไขได้ด้วยวิธีการทางสายตามานานแล้ว แต่ด้วยความแม่นยำไม่เพียงพอ และต้องใช้เครื่องมือขนาดใหญ่และบุคลากรที่มีคุณภาพและผ่านการฝึกอบรมมาอย่างดี เรดาร์ทำให้สามารถวัดช่วงไปยังเป้าหมายได้โดยการวัดเวลาหน่วงของพัลส์วิทยุที่สะท้อนจากเป้าหมาย หลักการทำงานของเครื่องวัดระยะควอนตัมขึ้นอยู่กับการวัดเวลาที่สัญญาณแสงผ่านไปยังเป้าหมายและด้านหลัง และมีดังต่อไปนี้: พัลส์การแผ่รังสีระยะสั้นอันทรงพลังที่สร้างโดยเครื่องกำเนิดควอนตัมออปติคัล (OCG) ของเครื่องวัดระยะคือ เกิดขึ้นจากระบบออพติคอลและมุ่งตรงไปยังเป้าหมาย ซึ่งเป็นช่วงที่ต้องวัด ชีพจรการแผ่รังสีที่สะท้อนจากเป้าหมาย เมื่อผ่านระบบออปติคัลแล้ว ตกลงบนตัวตรวจจับแสงเรนจ์ไฟน์เตอร์ โมเมนต์ของการแผ่รังสีของโพรบและโมเมนต์ของการรับสัญญาณที่สะท้อนจะถูกบันทึกโดยชุดทริกเกอร์ (BZ) และตัวตรวจจับแสง (FPU) ซึ่งจะสร้างสัญญาณไฟฟ้าเพื่อเริ่มและหยุดเครื่องวัดช่วงเวลา (IVI) IVI วัดช่วงเวลาระหว่างขอบนำของพัลส์ที่ปล่อยออกมาและพัลส์ที่สะท้อน ช่วงของเป้าหมายเป็นสัดส่วนกับช่วงเวลานี้และกำหนดโดยสูตร โดยที่ช่วงของเป้าหมายคือ m; - ความเร็วของแสงในบรรยากาศ m/s; - ช่วงเวลาที่วัดได้ s
ผลการวัดเป็นเมตรจะแสดงบนตัวบ่งชี้ดิจิตอลในมุมมองของช่องมองภาพด้านซ้ายของเครื่องวัดระยะ ในการสร้างอะนาล็อกเชิงแสงของเรดาร์ มีเพียงแหล่งกำเนิดแสงพัลซิ่งอันทรงพลังที่มีทิศทางของลำแสงที่ดีเท่านั้นที่หายไป เลเซอร์โซลิดสเตตแบบ Q-switched เป็นวิธีแก้ปัญหาที่ยอดเยี่ยมสำหรับปัญหานี้ เครื่องวัดระยะด้วยเลเซอร์ของโซเวียตเครื่องแรกได้รับการพัฒนาในช่วงกลางทศวรรษ 1960 โดยองค์กรอุตสาหกรรมการป้องกันประเทศที่มีประสบการณ์มากมายในการสร้างเครื่องมือเกี่ยวกับสายตา สถาบันวิจัย "เสา" ในขณะนั้นยังคงก่อตัวขึ้น งานแรกของสถาบันในทิศทางนี้คือการพัฒนาองค์ประกอบทับทิม 5.5 x 75 สำหรับเครื่องวัดระยะด้วยเลเซอร์ที่สร้างโดย TsNIIAG การพัฒนาเสร็จสมบูรณ์ในปี 1970 ด้วยการสร้างองค์ประกอบดังกล่าวด้วยการยอมรับจากลูกค้า ภาควิชาสถาบัน นำโดย V.M. ในปีเดียวกันนั้น คริฟต์ซันได้พัฒนาเลเซอร์ทับทิมสำหรับการวัดการโคจรในอวกาศและตำแหน่งทางแสงของดวงจันทร์ งานในมือจำนวนมากถูกสะสมไว้ในการสร้างเลเซอร์โซลิดสเตตสำหรับการใช้งานภาคสนามและการเทียบท่ากับอุปกรณ์ของลูกค้า สถาบันวิจัยเครื่องมือวัดอวกาศ (ผู้อำนวยการ - L.I. Gusev หัวหน้านักออกแบบของคอมเพล็กซ์ - V.D. Shargorodsky) ใช้เลเซอร์ของเราดำเนินการตำแหน่งทางแสงที่ประสบความสำเร็จของ Lunokhods ที่ยานอวกาศโซเวียตส่งไปยังพื้นผิวดวงจันทร์ในปี 2515-2516 ในเวลาเดียวกัน ตำแหน่งของ Lunokhods บนดวงจันทร์ก็ถูกกำหนดโดยการสแกนลำแสงเลเซอร์เช่นกัน ในปี 1970 งานเหล่านี้ยังคงดำเนินต่อไปโดยการพัฒนาเลเซอร์ระบุตำแหน่งโกเมนนีโอดิเมียม (Kandela หัวหน้านักออกแบบ Zverev G.M. นักแสดงชั้นนำ M.B. Zhitkova, V.V. Shulzhenko, V.P. Myznikov) ก่อนหน้านี้มีจุดประสงค์เพื่อใช้ในการบิน เลเซอร์นี้ประสบความสำเร็จในการติดตั้งและใช้งานเครือข่ายสถานีเลเซอร์ที่กว้างขวางสำหรับการวัดวิถีโคจรผ่านดาวเทียมที่ Maidanak ในปามีร์ ตะวันออกไกล แหลมไครเมีย และคาซัคสถานเป็นเวลาหลายปี ปัจจุบัน เลเซอร์รุ่นที่ 3 ที่พัฒนาขึ้นที่สถาบันวิจัย Polyus (I.V. Vasiliev, S.V. Zinoviev และอื่นๆ) ได้ดำเนินการอยู่ที่สถานีเหล่านี้แล้ว ประสบการณ์ในการพัฒนาเลเซอร์สำหรับการใช้งานทางทหารทำให้สามารถเริ่มพัฒนาเครื่องวัดระยะด้วยเลเซอร์ได้โดยตรงที่ Polyus ความคิดริเริ่มในการพัฒนาเครื่องวัดระยะที่สถาบัน แสดงโดย G.M. Zverev ซึ่งในปี 1970 เป็นหัวหน้าแผนกที่ซับซ้อนของสถาบันเพื่อการพัฒนาองค์ประกอบแบบแอคทีฟและไม่เชิงเส้น เลเซอร์โซลิดสเตตและอุปกรณ์ที่อิงตามนั้น ได้รับการสนับสนุนอย่างแข็งขันจากผู้อำนวยการ M.F. Stelmakh และผู้นำในอุตสาหกรรม
ในช่วงต้นทศวรรษ 1970 สถาบันแห่งนี้เป็นสถาบันเดียวในประเทศที่มีเทคโนโลยีสำหรับการปลูกผลึกเดี่ยวและสวิตช์ออปติคัลออปติคัล ซึ่งทำให้สามารถสร้างอุปกรณ์ที่มีมวลและขนาดที่เล็กกว่าอย่างเห็นได้ชัด ดังนั้นพลังงานปั๊มโดยทั่วไปของเลเซอร์ทับทิมสำหรับเครื่องวัดระยะคือ 200 จูล และสำหรับเลเซอร์โกเมนเพียง 10 จูล ระยะเวลาชีพจรของเลเซอร์ก็ลดลงหลายครั้งเช่นกัน ซึ่งเพิ่มความแม่นยำในการวัด การพัฒนาครั้งแรกของอุปกรณ์เริ่มขึ้นในช่วงปลายยุค 60 ภายใต้การนำของ V.M. คริฟซุน. ตามแนวคิดการจัดวาง เขาเลือกโครงร่างด้วยเลนส์เดี่ยว โดยใช้องค์ประกอบอิเล็กโทร-ออปติคัลเป็นสวิตช์ระหว่างช่องสัญญาณอินพุตและเอาต์พุต โครงร่างนี้คล้ายกับของเรดาร์ที่มีสวิตช์เสาอากาศ เลือกเลเซอร์ที่ใช้คริสตัล YAG:Nd ซึ่งทำให้สามารถรับพลังงานรังสีอินฟราเรดที่ส่งออกเพียงพอ (20 mJ) ได้ V.M. Krivtsun ล้มเหลวในการพัฒนาอุปกรณ์จนเสร็จ เขาป่วยหนักและเสียชีวิตในปี 1971 A.G. ต้องพัฒนาให้เสร็จ Ershov ซึ่งเคยพัฒนาเลเซอร์แบบปรับได้เพื่อการวิจัยทางวิทยาศาสตร์มาก่อน โครงร่างออปติคัลต้องเปลี่ยนเป็นแบบคลาสสิกที่มีเลนส์ตัวส่งและตัวรับแยกจากกัน เนื่องจากรูปแบบที่รวมกันไม่สามารถรับมือกับการส่องสว่างของเครื่องตรวจจับแสงด้วยพัลส์ตัวส่งสัญญาณอันทรงพลัง การทดสอบเต็มรูปแบบที่ประสบความสำเร็จของตัวอย่าง R&D แรกของอุปกรณ์ Contrast-2 ที่ประสบความสำเร็จเกิดขึ้นในเดือนมิถุนายน พ.ศ. 2514 การบริหารภูมิประเทศทางทหารทำหน้าที่เป็นลูกค้าสำหรับการวิจัยและพัฒนาของเครื่องวัดระยะด้วยเลเซอร์เครื่องแรกของประเทศ การพัฒนาเสร็จสิ้นในเวลาอันสั้น แล้วในปี 1974 เครื่องวัดระยะภูมิประเทศควอนตัม KTD-1 (รูปที่ 1.2.1) ได้รับการยอมรับสำหรับการจัดหาและโอนไปยังการผลิตแบบอนุกรมที่โรงงาน Tantal ใน Saratov

ข้าว. 1.2.1
ด้วยการพัฒนานี้ พรสวรรค์ของ Chief Designer A.G. ได้แสดงออกมาอย่างเต็มที่ Ershov ผู้ซึ่งสามารถเลือกโซลูชันทางเทคนิคหลักของอุปกรณ์ได้อย่างถูกต้อง จัดระเบียบการพัฒนาบล็อกและส่วนประกอบ องค์ประกอบการทำงานใหม่โดยแผนกที่อยู่ติดกัน อุปกรณ์นี้มีระยะทางสูงสุด 20 กม. โดยมีข้อผิดพลาดน้อยกว่า 1.7 ม. เครื่องค้นหาระยะ KTD-1 ถูกผลิตขึ้นเป็นจำนวนมากในเมือง Saratov และโรงงาน VTU ในมอสโก สำหรับช่วง พ.ศ. 2517 - 2523 กองทัพได้รับอุปกรณ์ดังกล่าวมากกว่า 1,000 ชิ้น ได้ถูกนำมาใช้อย่างประสบความสำเร็จในการแก้ปัญหาหลายประการเกี่ยวกับภูมิประเทศทางการทหารและพลเรือน จะมีการพัฒนาองค์ประกอบใหม่จำนวนหนึ่งที่สถาบันสำหรับเครื่องวัดระยะด้วยเลเซอร์ ในสาขาวิชาวัสดุศาสตร์ภายใต้การนำของ V.M. Garmash และ V.P. Klyuev องค์ประกอบแอคทีฟคุณภาพสูงถูกสร้างขึ้นจากโกเมนอลูมิเนียมอิตเทรียมและอิตเทรียมอะลูมิเนตกับนีโอไดเมียม เอ็นบี Angert, วี.เอ. Pashkov และ A.M. Onishchenko สร้างบานประตูหน้าต่างไฟฟ้าออปติคัลที่ทำจากลิเธียม niobate ซึ่งไม่มีสิ่งที่คล้ายคลึงกันในโลก ในส่วนของป. Tsetlin สร้างบานประตูหน้าต่างย้อมแบบพาสซีฟ บนพื้นฐานธาตุนี้ E.M. Shvom และ N.S. Ustimenko พัฒนาเครื่องยิงเลเซอร์ขนาดเล็ก ILTI-201 และ IZ-60 สำหรับเครื่องวัดระยะขนาดเล็ก ในเวลาเดียวกัน แผนกของ A.V. อีฟสกี้ วี.เอ. Afanasev และ M.M. เซมยานอฟ เครื่องวัดระยะด้วยเลเซอร์ LDI-3 ขนาดเล็ก (ในรูปของกล้องส่องทางไกล) เครื่องแรก (รูปที่ 1.2.2) ได้รับการทดสอบที่ไซต์ทดสอบในปี 2520 และในปี 2523 การทดสอบของรัฐดำเนินการสำเร็จแล้ว

ข้าว. 1.2.2
อุปกรณ์ดังกล่าวได้รับการฝึกฝนเป็นลำดับที่โรงงาน Ulyanovsk Radiotube ในปี 1982 ได้ทำการทดสอบเปรียบเทียบสถานะของอุปกรณ์ LDI-3 และอุปกรณ์ 1D13 ที่พัฒนาโดยโรงงาน Kazan Optical and Mechanical ตามคำสั่งของภูมิภาคมอสโก ด้วยเหตุผลหลายประการ คณะกรรมการจึงพยายามให้ความสำคัญกับอุปกรณ์ KOMZ อย่างไรก็ตาม การทำงานที่ไร้ที่ติของเครื่องวัดระยะของสถาบันวิจัย Polyus ในระหว่างการทดสอบ ส่งผลให้อุปกรณ์ทั้งสองได้รับการแนะนำให้ยอมรับสำหรับการจัดหาและการผลิตจำนวนมาก: 1D13 สำหรับกองกำลังภาคพื้นดินและ LDI-3 สำหรับกองทัพเรือ ในเวลาเพียง 10 ปี อุปกรณ์ LDI-3 หลายพันเครื่องและการดัดแปลงเพิ่มเติม LDI-3-1 ถูกนำไปใช้ในการผลิต ในช่วงปลายยุค 80 A.G. Ershov ได้พัฒนาขึ้น รุ่นล่าสุด rangefinder-กล้องส่องทางไกล LDI-3-1M ที่มีมวลน้อยกว่า 1.3 กก. เธอกลายเป็น ผลงานล่าสุด Chief Designer มากความสามารถ ซึ่งถึงแก่กรรมเมื่อต้นปี 1989
แนวการพัฒนาสำหรับ WTU ซึ่งเริ่มต้นโดย KTD-1 ยังคงดำเนินต่อไปด้วยอุปกรณ์ใหม่ จากความร่วมมือเชิงสร้างสรรค์ระหว่างสถาบันวิจัยโพลีอุสและสถาบันวิจัยวิทยาศาสตร์การทหารและความร่วมมือทางเทคนิคแห่งที่ 29 เรนจ์ไฟนจึงถูกสร้างขึ้น - ไจโรธีโอโดไลต์ DGT-1 ("กัปตัน") ซึ่งวัดระยะทางไปยังวัตถุบนพื้นด้วยข้อผิดพลาด น้อยกว่า 1 เมตรและพิกัดเชิงมุม - แม่นยำยิ่งขึ้น 20 arcsec ในปี 1986 เครื่องวัดระยะด้วยเลเซอร์ KTD-2-2 ได้รับการพัฒนาและยอมรับการจ่าย - หัวฉีดบนกล้องสำรวจ (รูปที่ 1.2.3)

ข้าว. 1.2.3
ในปี 1970 เครื่องวัดระยะควอนตัมแบบใหม่ (DAK-1, DAK-2, 1D5 เป็นต้น) ได้เข้ามาให้บริการ พวกเขาทำให้สามารถกำหนดพิกัดของวัตถุ (เป้าหมาย) และการระเบิดของกระสุนได้ในเวลาอันสั้นด้วยความแม่นยำสูง เพื่อให้มั่นใจถึงความเหนือกว่าของลักษณะเฉพาะ ก็เพียงพอที่จะเปรียบเทียบข้อผิดพลาดมัธยฐานในการวัดช่วง: DS-1 - 1.5 เปอร์เซ็นต์ (ด้วยระยะการสังเกตสูงสุด 3 กม.), DAK - 10 ม. (โดยไม่คำนึงถึงระยะ) การใช้ตัวค้นหาระยะทำให้สามารถลดเวลาการตรวจจับของเป้าหมายได้อย่างมาก เพิ่มโอกาสในการเปิดทั้งกลางวันและกลางคืน และ จึงเพิ่มประสิทธิภาพการยิงปืนใหญ่ ปืนใหญ่วัดระยะควอนตัมเป็นหนึ่งในวิธีการหลักในการลาดตระเวนในหน่วยปืนใหญ่ นอกเหนือจากวัตถุประสงค์หลัก - การวัดระยะแล้ว เครื่องวัดระยะควอนตัมยังช่วยให้สามารถแก้ปัญหาการลาดตระเวนทางสายตาของภูมิประเทศและข้าศึก แก้ไขการยิง การวัดมุมแนวนอนและแนวตั้ง การเชื่อมโยงภูมิประเทศและภูมิศาสตร์ขององค์ประกอบของรูปแบบการต่อสู้ของ หน่วยปืนใหญ่ นอกจากนี้ ตัวระบุเป้าหมายด้วยเลเซอร์เรนจ์ไฟนเดอร์ 1D15 ยังช่วยให้ส่องสว่างเป้าหมายด้วยการแผ่รังสีเลเซอร์ด้วยการนำทางแบบกึ่งแอ็คทีฟเมื่อทำภารกิจการยิงด้วยอาวุธยุทโธปกรณ์ความแม่นยำสูงพร้อมหัวกลับบ้าน ในปัจจุบัน เครื่องวัดระยะควอนตัมประเภทต่อไปนี้ยังให้บริการอยู่: , ปืนใหญ่เรนจ์ไฟนเดอร์ควอนตัม DAK-2 (1D11) และการดัดแปลง DAK-2M-1 (1D11M-1) และ DAK-2M-2 (1D11M-2), อุปกรณ์ลาดตระเวนเลเซอร์ LPR-1 (1D13), rangefinder-designator 1D15